[论文理解] On the "steerability" of generative adversarial networks
2021-04-22 10:26
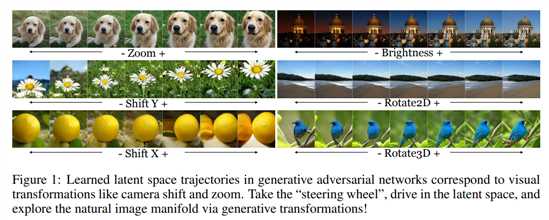
标签:des network step omega tran 量化 object 生成 inline 本文提出对GAN的latent space进行操作的一种方法,通过对latent space的编辑实现生成域外样本,操控生成样本的基本属性,如控制生成样本的位置、光照、二维旋转、三维旋转等等。 文章的主要贡献为: GAN经过训练能够学习到一种映射,使得\(G(z) \rightarrow x\),也就是将latent space的采样结果映射为一图像分布下的样本。因此很自然就想到了,能否学习一种变换,使得对latent space的变换,也能映射到图像分布?作者称之为“walk”,即在latent space中执行某种变换,生成的图像也会做出相应的变换,以此来调节生成的图片,甚至可以生成域外样本。 \[
\omega^* = \mathop{argmin}_\omega \mathbb{E}_{z,\alpha}[\ell(G(z + \alpha \omega),edit(G(z),\alpha))]
\] 上式edit是对生成的图像的变换操作,\(\alpha\)是外部调节参数,\(\omega\)是可学习参数,看起来相当的简单。这里是认为G已经训练好了,即已经经过对抗训练可以生成图片了。公式假设的是操作是线性操作,实际上如果是非线性操作就拟合一个对z的非线性函数,神经网络里往往用非线性激活拟合非线性,拟合的应该是一个step的变化。所以递归变换n次就是nstep的变换。 本文还提出变换前后量化对比的指标,以量化变换的效果。 对于颜色变换,量化指标是随机抽取变换前后100 pixels像素值的变化,归一化到1. 对于zoom和shift的变换,量化指标是用一个目标检测网络输出物体中心位置,除以box的宽高归一化。 上面说了,是在G确定的情况下去学习latent space的变换,那么能否直接端到端训练呢?显然是可以的. 实验部分太长了,不感兴趣。 代码已开源:https://ali-design.github.io/gan_steerability/ [论文理解] On the "steerability" of generative adversarial networks 标签:des network step omega tran 量化 object 生成 inline 原文地址:https://www.cnblogs.com/aoru45/p/12244447.htmlOn the "steerability" of generative adversarial networks
Intro
Objective
\[
\ell = \mathbb{E}_{z,n}[||f^n(z)-edit(G(z),n\epsilon)||]
\]
其中n表示第n个step,\(\epsilon\)表示步长,\(f^n(z)\)是n次递归函数。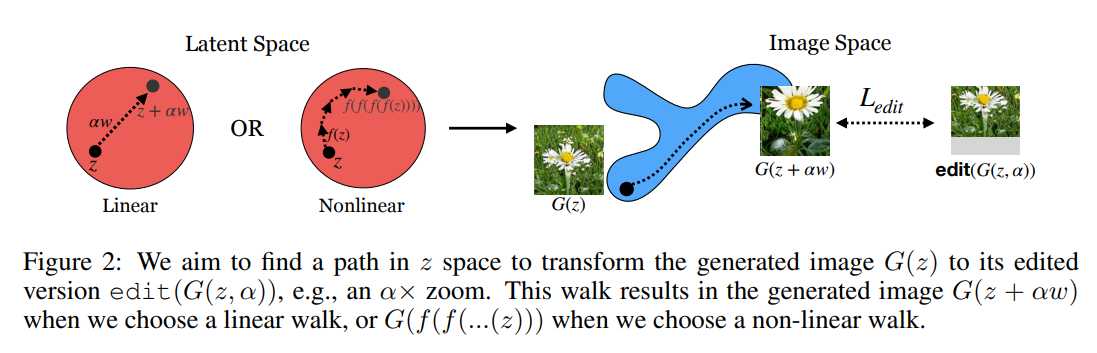
Quantifying Steerability
Reducing Transformation Limits
\[
G^*,\omega^* = \mathop{argmin}_{G,\omega}(\ell_{edit} + \ell_{GAN})
\]
直接端到端训练,GAN的loss按照原来的,而编辑loss拿输入原图和编辑后的做loss即可。
上一篇:html+css入门
文章标题:[论文理解] On the "steerability" of generative adversarial networks
文章链接:http://soscw.com/essay/78026.html