PCL 1.60 +windows+vs2010 安装与配置
2021-05-02 03:26
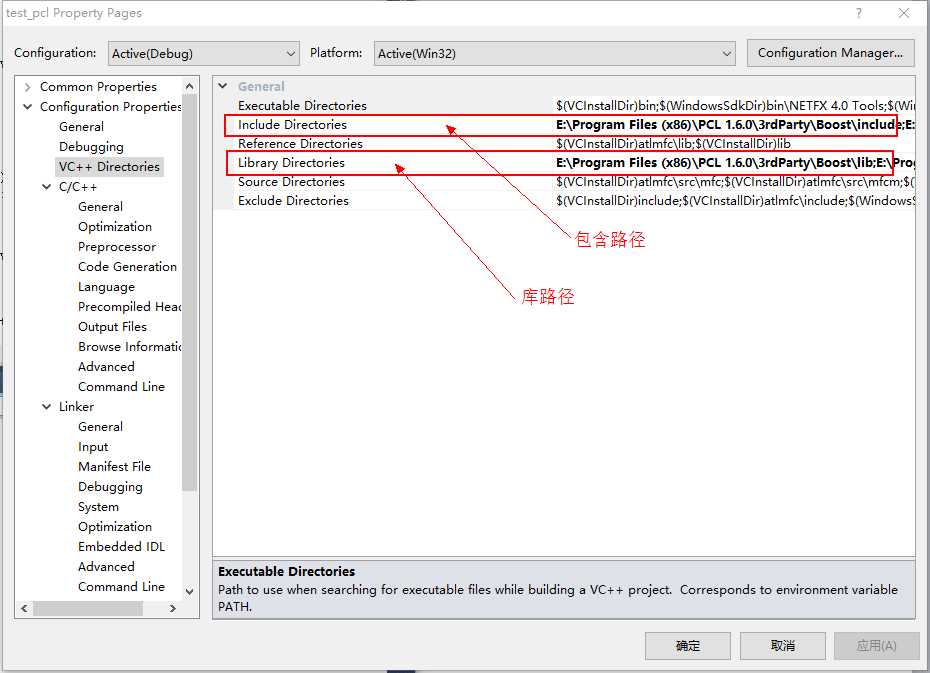
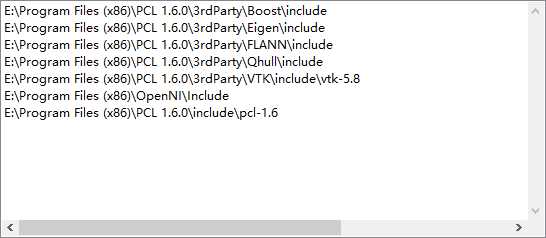
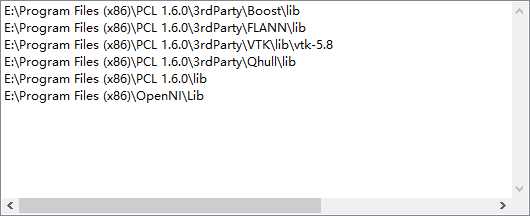
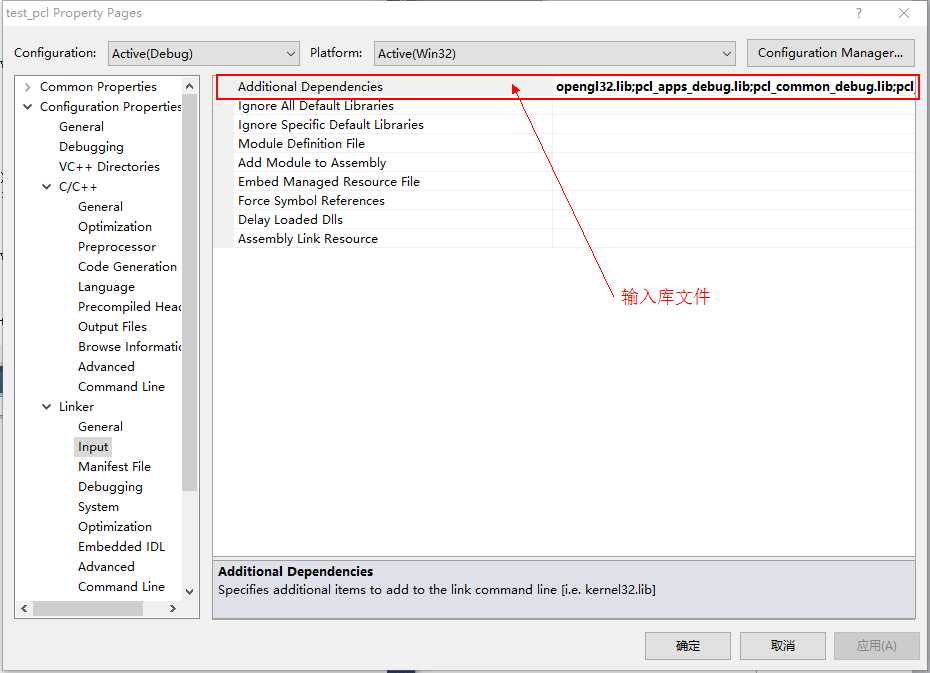
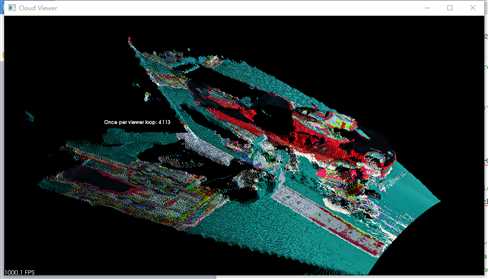
标签:iic 输入 function segment debug com read use 依赖库 PCL简介 PCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。如果说OpenCV是2D信息获取与处理的结晶,那么PCL就在3D信息获取与处理上具有同等地位,PCL是BSD授权方式,可以免费进行商业和学术应用。 最近刚接触PCL,发现用到PCL的人还是比较少,可供学习的资料也不多,所以,我想从头开始学习,并记录下学习的过程。如果有兴趣一起学习的同学可以加我QQ761551935,我们一起交流学习。 学习资源: PCL 1.8.0 比较全的安装包及安装步骤:http://unanancyowen.com/en/pcl18/ PCL 相关资料汇总:https://github.com/neilgu00365/Survey-for-SfMMission PCL 中国点云库:http://www.pclcn.org/ 环境:windows+vs2010 如果你没有vs2010我给你分享一个安装包链接:http://pan.baidu.com/s/1pL3I0dH 密码:a53o 一、下载 我用的是PCL 1.6.0 All-In-One Installer,Windows MSVC 2010 (32bit),所以,下面是以这个版本为主。其实,只要下载PCL-1.6.0-AllInOne-msvc2010-win32.exe、OpenNI 1.5.4 (patched)和Sensor 5.1.0 (patched)三个文件就可以了,PCL-1.6.0-AllInOne-msvc2010-win32.exe内部已经包含了全部的依赖库,安装的过程中,OpenNI会安装不上,所以要单独下载,其它的依赖库都可以不用下载。 二、安装 分别安装 1、PCL-1.6.0-AllInOne-msvc2010-win32.exe 2、OpenNI-Win32-1.5.4-Dev.msi 3、Sensor-Win-OpenSource32-5.1.0.msi 注意:你要编译的是Win32和Win64的版本要区别开,PCL和依赖库都统一用同一个版本的,否则运行的时候会报错。 三、配置 1、配置包含路径 将PCL安装路径下的3rdParty目录下的include添加进去,另外OpenNI单独安装的路径也添加进去,还有PCL安装路径下的Include\pcl-1.6也添加进去。 2、配置库路径 将PCL安装路径下的3rdParty目录下的lib添加进去,另外OpenNI单独安装的路径也添加进去,还有PCL安装路径下的lib也添加进去。 3、配置输入库文件 添加下列文件名 文件有点多,这里可以有个比较快的方法:这里以vtk为例, 打开CMD->进入PCL的安装目录->进入3rdParty\VTK\lib\vtk-5.8目录->输入命令:dir /b *gd.lib -> list.txt 命令的意思是找出gd.lib结尾的文件并保存到list.txt文档里面。然后当前目录就会生成list.txt 四、Demo 例程: 以上效果图是用realsense的SR300获取到我桌面的点云。 my_point_cloud.pcd 文件 链接:http://pan.baidu.com/s/1gfD2lF1 密码:cexi 五、总结分享 1、pcd读取有点慢,据说pcd数据以有序点云的方式保存会好一点,但是没我试了没看出来能快多少,这个有待研究。 2、SR300直接获取的深度图像和RGB图像坐标上有偏差,这个考虑下怎么做对齐。 3、如果工程配置上SR300的SDK和opencv,我们就不需要在另一个工程先保存pcd文件再读取,中间就可以省了很多步骤。 4、PCL的学习资料还是很少,目前听说比较好也就只有《点云库PCL学习教程》,我也买了一本,慢慢学吧。 PCL 1.60 +windows+vs2010 安装与配置 标签:iic 输入 function segment debug com read use 依赖库 原文地址:http://www.cnblogs.com/chensheng-zhou/p/7773643.html
opengl32.lib
pcl_apps_debug.lib
pcl_common_debug.lib
pcl_features_debug.lib
pcl_filters_debug.lib
pcl_io_debug.lib
pcl_io_ply_debug.lib
pcl_kdtree_debug.lib
pcl_keypoints_debug.lib
pcl_octree_debug.lib
pcl_registration_debug.lib
pcl_sample_consensus_debug.lib
pcl_search_debug.lib
pcl_segmentation_debug.lib
pcl_surface_debug.lib
pcl_tracking_debug.lib
pcl_visualization_debug.lib
flann_cpp_s-gd.lib
boost_chrono-vc100-mt-gd-1_49.lib
boost_date_time-vc100-mt-gd-1_47.lib
boost_date_time-vc100-mt-gd-1_49.lib
boost_filesystem-vc100-mt-gd-1_47.lib
boost_filesystem-vc100-mt-gd-1_49.lib
boost_graph-vc100-mt-gd-1_49.lib
boost_graph_parallel-vc100-mt-gd-1_49.lib
boost_iostreams-vc100-mt-gd-1_47.lib
boost_iostreams-vc100-mt-gd-1_49.lib
boost_locale-vc100-mt-gd-1_49.lib
boost_math_c99-vc100-mt-gd-1_49.lib
boost_math_c99f-vc100-mt-gd-1_49.lib
boost_math_tr1-vc100-mt-gd-1_49.lib
boost_math_tr1f-vc100-mt-gd-1_49.lib
boost_mpi-vc100-mt-gd-1_49.lib
boost_prg_exec_monitor-vc100-mt-gd-1_49.lib
boost_program_options-vc100-mt-gd-1_49.lib
boost_random-vc100-mt-gd-1_49.lib
boost_regex-vc100-mt-gd-1_49.lib
boost_serialization-vc100-mt-gd-1_49.lib
boost_signals-vc100-mt-gd-1_49.lib
boost_system-vc100-mt-gd-1_47.lib
boost_system-vc100-mt-gd-1_49.lib
boost_thread-vc100-mt-gd-1_47.lib
boost_thread-vc100-mt-gd-1_49.lib
boost_timer-vc100-mt-gd-1_49.lib
boost_unit_test_framework-vc100-mt-gd-1_49.lib
boost_wave-vc100-mt-gd-1_49.lib
boost_wserialization-vc100-mt-gd-1_49.lib
libboost_chrono-vc100-mt-gd-1_49.lib
libboost_date_time-vc100-mt-gd-1_47.lib
libboost_date_time-vc100-mt-gd-1_49.lib
libboost_filesystem-vc100-mt-gd-1_47.lib
libboost_filesystem-vc100-mt-gd-1_49.lib
libboost_graph_parallel-vc100-mt-gd-1_49.lib
libboost_iostreams-vc100-mt-gd-1_47.lib
libboost_iostreams-vc100-mt-gd-1_49.lib
libboost_locale-vc100-mt-gd-1_49.lib
libboost_math_c99-vc100-mt-gd-1_49.lib
libboost_math_c99f-vc100-mt-gd-1_49.lib
libboost_math_tr1-vc100-mt-gd-1_49.lib
libboost_math_tr1f-vc100-mt-gd-1_49.lib
libboost_mpi-vc100-mt-gd-1_49.lib
libboost_prg_exec_monitor-vc100-mt-gd-1_49.lib
libboost_program_options-vc100-mt-gd-1_49.lib
libboost_random-vc100-mt-gd-1_49.lib
libboost_regex-vc100-mt-gd-1_49.lib
libboost_serialization-vc100-mt-gd-1_49.lib
libboost_signals-vc100-mt-gd-1_49.lib
libboost_system-vc100-mt-gd-1_47.lib
libboost_system-vc100-mt-gd-1_49.lib
libboost_test_exec_monitor-vc100-mt-gd-1_49.lib
libboost_thread-vc100-mt-gd-1_47.lib
libboost_thread-vc100-mt-gd-1_49.lib
libboost_timer-vc100-mt-gd-1_49.lib
libboost_unit_test_framework-vc100-mt-gd-1_49.lib
libboost_wave-vc100-mt-gd-1_49.lib
libboost_wserialization-vc100-mt-gd-1_49.lib
vtkalglib-gd.lib
vtkCharts-gd.lib
vtkCommon-gd.lib
vtkDICOMParser-gd.lib
vtkexoIIc-gd.lib
vtkexpat-gd.lib
vtkFiltering-gd.lib
vtkfreetype-gd.lib
vtkftgl-gd.lib
vtkGenericFiltering-gd.lib
vtkGeovis-gd.lib
vtkGraphics-gd.lib
vtkhdf5-gd.lib
vtkHybrid-gd.lib
vtkImaging-gd.lib
vtkInfovis-gd.lib
vtkIO-gd.lib
vtkjpeg-gd.lib
vtklibxml2-gd.lib
vtkmetaio-gd.lib
vtkNetCDF-gd.lib
vtkNetCDF_cxx-gd.lib
vtkpng-gd.lib
vtkproj4-gd.lib
vtkRendering-gd.lib
vtksqlite-gd.lib
vtksys-gd.lib
vtktiff-gd.lib
vtkverdict-gd.lib
vtkViews-gd.lib
vtkVolumeRendering-gd.lib
vtkWidgets-gd.lib
vtkzlib-gd.lib
#include
文章标题:PCL 1.60 +windows+vs2010 安装与配置
文章链接:http://soscw.com/essay/81145.html