tensorflow(三十九):实战——深度残差网络ResNet18
2021-05-07 05:26
标签:cat apply imp equal conv2 ase from mic seq tensorflow(三十九):实战——深度残差网络ResNet18 标签:cat apply imp equal conv2 ase from mic seq 原文地址:https://www.cnblogs.com/zhangxianrong/p/14725992.html一、基础
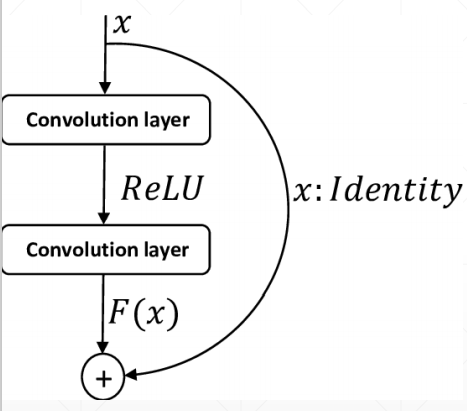
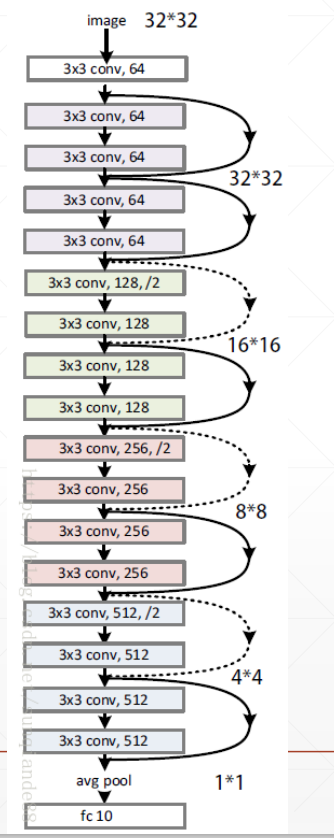
二、ResNet18
import tensorflow as tf
from tensorflow import keras
from tensorflow.keras import layers, Sequential
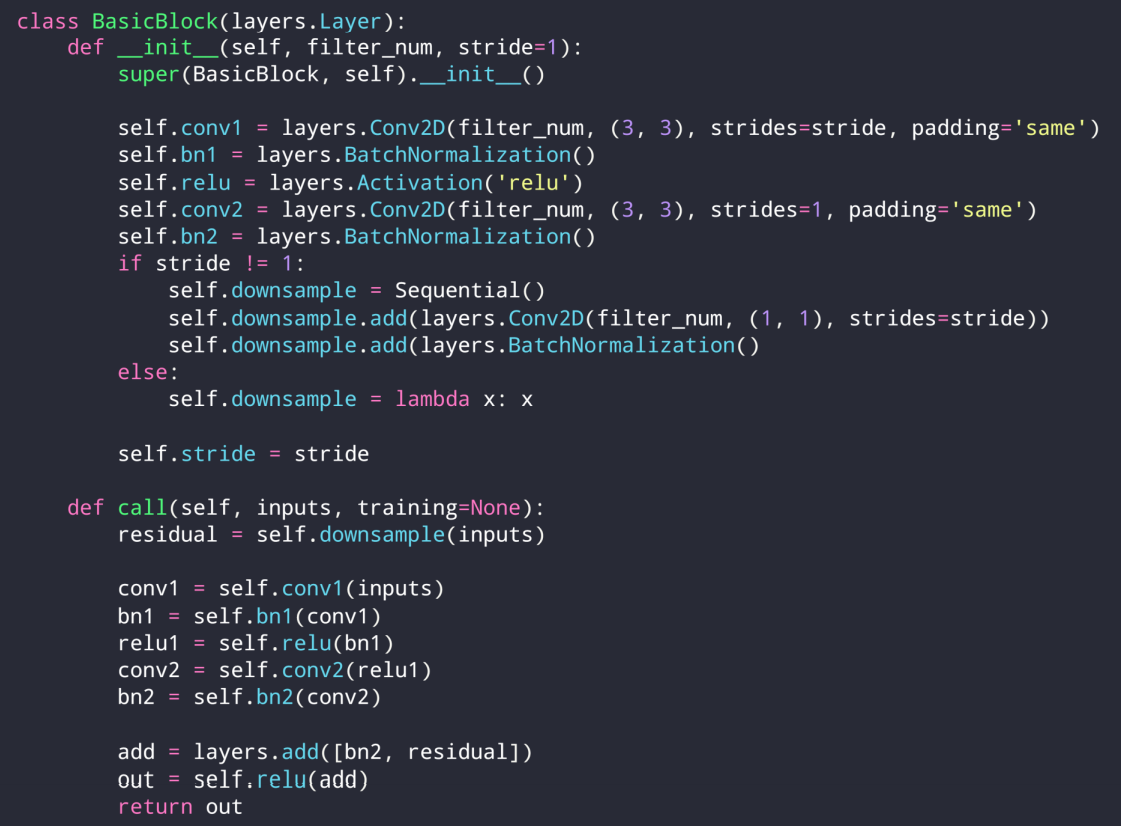
class BasicBlock(layers.Layer):
def __init__(self, filter_num, stride=1):
super(BasicBlock, self).__init__()
self.conv1 = layers.Conv2D(filter_num, (3, 3), strides=stride, padding=‘same‘)
self.bn1 = layers.BatchNormalization()
self.relu = layers.Activation(‘relu‘)
self.conv2 = layers.Conv2D(filter_num, (3, 3), strides=1, padding=‘same‘)
self.bn2 = layers.BatchNormalization()
if stride != 1:
self.downsample = Sequential()
self.downsample.add(layers.Conv2D(filter_num, (1, 1), strides=stride))
else:
self.downsample = lambda x:x
def call(self, inputs, training=None):
# [b, h, w, c]
out = self.conv1(inputs)
out = self.bn1(out,training=training)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out,training=training)
identity = self.downsample(inputs)
output = layers.add([out, identity])
output = tf.nn.relu(output)
return output
class ResNet(keras.Model):
def __init__(self, layer_dims, num_classes=100): # [2, 2, 2, 2]
super(ResNet, self).__init__()
self.stem = Sequential([layers.Conv2D(64, (3, 3), strides=(1, 1)),
layers.BatchNormalization(),
layers.Activation(‘relu‘),
layers.MaxPool2D(pool_size=(2, 2), strides=(1, 1), padding=‘same‘)
])
self.layer1 = self.build_resblock(64, layer_dims[0])
self.layer2 = self.build_resblock(128, layer_dims[1], stride=2)
self.layer3 = self.build_resblock(256, layer_dims[2], stride=2)
self.layer4 = self.build_resblock(512, layer_dims[3], stride=2)
# output: [b, 512, h, w],
self.avgpool = layers.GlobalAveragePooling2D()
self.fc = layers.Dense(num_classes)
def call(self, inputs, training=None):
x = self.stem(inputs,training=training)
x = self.layer1(x,training=training)
x = self.layer2(x,training=training)
x = self.layer3(x,training=training)
x = self.layer4(x,training=training)
# [b, c]
x = self.avgpool(x)
# [b, 100]
x = self.fc(x)
return x
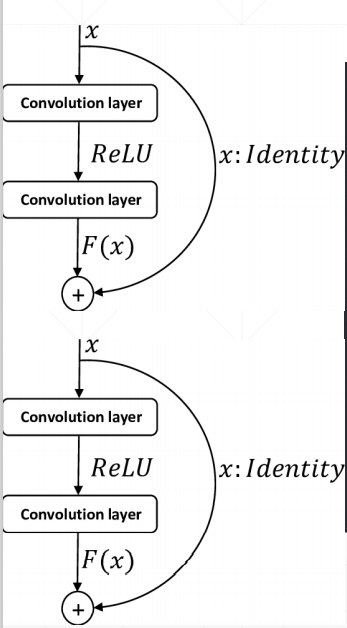
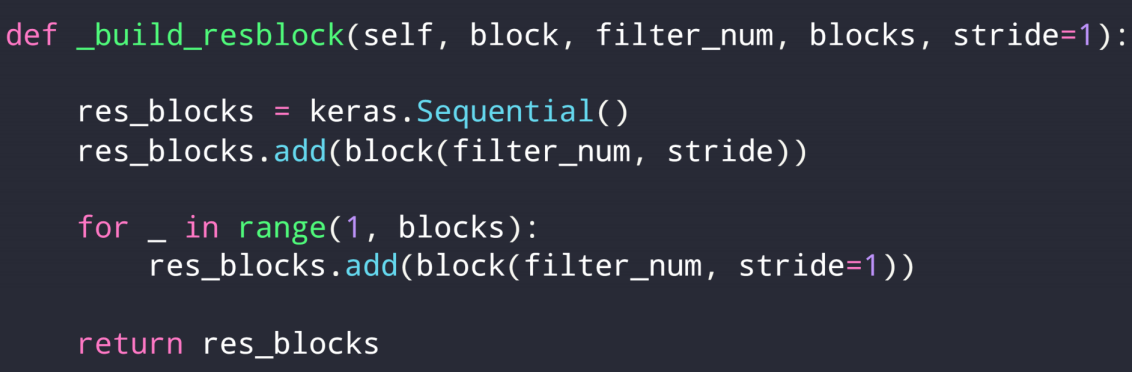
def build_resblock(self, filter_num, blocks, stride=1):
res_blocks = Sequential()
# may down sample
res_blocks.add(BasicBlock(filter_num, stride))
for _ in range(1, blocks):
res_blocks.add(BasicBlock(filter_num, stride=1))
return res_blocks
def resnet18():
return ResNet([2, 2, 2, 2])
def resnet34():
return ResNet([3, 4, 6, 3])
三、train
import os
os.environ[‘TF_CPP_MIN_LOG_LEVEL‘]=‘2‘
import tensorflow as tf
from tensorflow.keras import layers, optimizers, datasets, Sequential
from resnet import resnet18
tf.random.set_seed(2345)
def preprocess(x, y):
# [-1~1]
x = tf.cast(x, dtype=tf.float32) / 255. - 0.5
y = tf.cast(y, dtype=tf.int32)
return x,y
(x,y), (x_test, y_test) = datasets.cifar100.load_data()
y = tf.squeeze(y, axis=1)
y_test = tf.squeeze(y_test, axis=1)
print(x.shape, y.shape, x_test.shape, y_test.shape)
train_db = tf.data.Dataset.from_tensor_slices((x,y))
train_db = train_db.shuffle(1000).map(preprocess).batch(512)
test_db = tf.data.Dataset.from_tensor_slices((x_test,y_test))
test_db = test_db.map(preprocess).batch(512)
sample = next(iter(train_db))
print(‘sample:‘, sample[0].shape, sample[1].shape,
tf.reduce_min(sample[0]), tf.reduce_max(sample[0]))
def main():
# [b, 32, 32, 3] => [b, 1, 1, 512]
model = resnet18()
model.build(input_shape=(None, 32, 32, 3))
model.summary()
optimizer = optimizers.Adam(lr=1e-3)
for epoch in range(500):
for step, (x,y) in enumerate(train_db):
with tf.GradientTape() as tape:
# [b, 32, 32, 3] => [b, 100]
logits = model(x,training=True)
# [b] => [b, 100]
y_onehot = tf.one_hot(y, depth=100)
# compute loss
loss = tf.losses.categorical_crossentropy(y_onehot, logits, from_logits=True)
loss = tf.reduce_mean(loss)
grads = tape.gradient(loss, model.trainable_variables)
optimizer.apply_gradients(zip(grads, model.trainable_variables))
if step %50 == 0:
print(epoch, step, ‘loss:‘, float(loss))
total_num = 0
total_correct = 0
for x,y in test_db:
logits = model(x,training=False)
prob = tf.nn.softmax(logits, axis=1)
pred = tf.argmax(prob, axis=1)
pred = tf.cast(pred, dtype=tf.int32)
correct = tf.cast(tf.equal(pred, y), dtype=tf.int32)
correct = tf.reduce_sum(correct)
total_num += x.shape[0]
total_correct += int(correct)
acc = total_correct / total_num
print(epoch, ‘acc:‘, acc)
if __name__ == ‘__main__‘:
main()
上一篇:python学习第40天
下一篇:HTML
文章标题:tensorflow(三十九):实战——深度残差网络ResNet18
文章链接:http://soscw.com/essay/83532.html