【玩转开源】BananaPi R2——移植RPi.GPIO 到 R2
2021-06-11 03:07
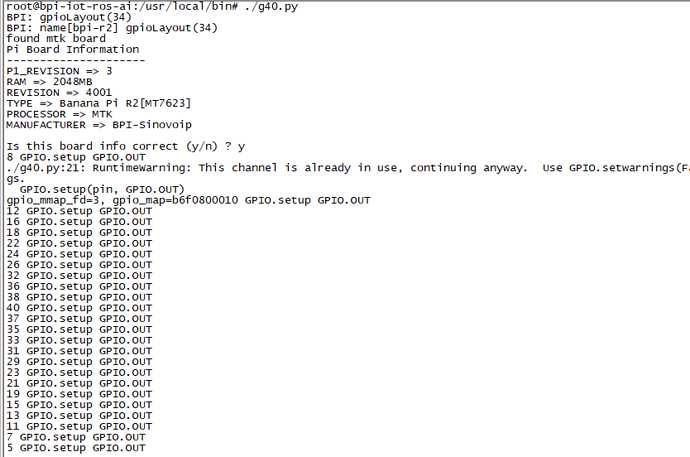
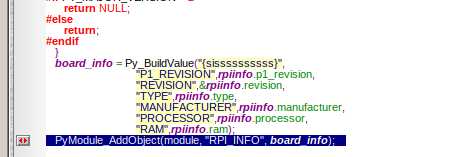
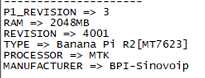
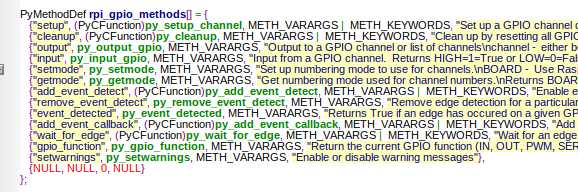
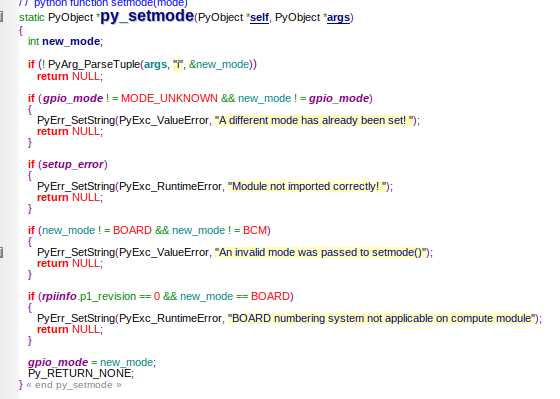
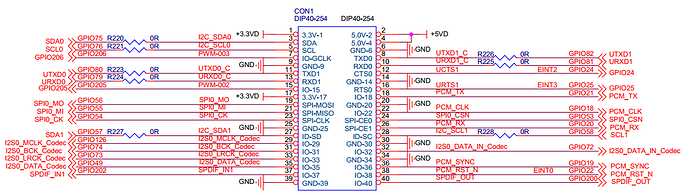
标签:原理图 用户 ast 根据 取数 one 效果 str path 1. 首先给大家介绍一下什么是RPi.GPIO. 简单去讲,RPi.GPIO就是一个运行在树莓派开发板上可以通过Python去控制GPIO的一个中间件。 现在我这边做了一个基础功能的移植,接下来大家可以跟着我去学习一下RPi.GPIO是如何通过Python去实现控制开发板上的GPIO的。 2. 看一下效果图: 2.1 硬件实物运行效果 2.2 执行Python脚本打印的log 3. 那么RPi.GPIO在R2上是如何使用的呢? 3.1 首先在R2上面运行一个Ubuntu镜像,然后下载代码:git clone https://github.com/BPI-SINOVOIP/RPi.GPIO 3.2 安装Python环境 3.3 安装中间件 安装参考:http://wiki.banana-pi.org/Getting_Started_with_R2#Install_RPi.GPIO(偷偷告诉你们这个wiki我也在维护哦,欢迎大家留言提建议) 3.4 安装完成后进入到R2 Ubuntu下的路径:cd /usr/local/bin,你会发现有个g40.py的python文件,我们可以打开简单看一下(这里代码的注释,是我加的,目的是为了让大家更好理解这段Python程序): 3.5 最上层的接口看完了,接下来我们该看中间件是如何实现上面这些接口的调用的 下载代码:git clone https://github.com/BPI-SINOVOIP/RPi.GPIO 代码下载完成后,我们打开先简单看一看,我们从g40.py里面调用的第一个接口看起:GPIO.RPI_INFO.items() 我们先搜索一下接口RPI_INFO: 发现这个接口三在Py_gpio.c里面有出现,我们点进去看一下: 原来这个接口在这里,那这里的PyModule_AddObject是干什么的呢?先看一下官方解释: 这个接口实际上是Python调用外部代码的一种方式,简单理解就是可以通过 “Module.name” 的方式来调用 "value". 然后我们再来看一下g40.py里面的这段代码: Module的名称为GPIO,name是"RPI_INFO",这里使用GPIO.RPI_INFO实际上就调用到了value,根据上面代码的定义,这个value是board_info,那么这段代码实际上就是调用board_info,接下来我们再看看board_info是怎么定义的. 这里可以看到board_info是从Py_BuildValue这里获取的值,那么Py_BuildValue又是做什么的呢?先看一下官方的解释: 意思就是获取C语言格式的字符串,看起来这里Python和C开始有联系咯,我们看看最开始的打印: 看到这里的打印,和上面Py_BuildValue()里面的参数对比一下,是不是开始有感觉了;没错这里已经成功从Python调用到C了. 我们接下来再看看g40.py,代码马上执行到:GPIO.setmode(GPIO.BOARD),对应的我们去看源码是怎么样的: 首先我们找一下这个BOARD参数,可以看到这个参数是一个int类型的变量; 接下来我们再看看setmode方法: 这里可以看到setmode方法实际上是调用的py_setmode,我们再看看这个py_setmode是怎么定义的: 看到这里实际上我们会发现,其实就是C的写法了,简单去看就是返回一个PyObject* 类型的C函数;到这里我们已经大概学习到Python如何调用C的参数和函数了. 4. 那么 R2 上的GPIO又是如何实现被控制的呢? 在这里大家有没有注意到,当我们运行g40.py的时候,实际上里面也是运行的C代码,再挖一层实际上当执行这个Python脚本就相当于就是执行的C代码,换句话说,就是我们只要实现了如何通过C去控制GPIO,那么就能实现Python去控制GPIO;那么我们要如何去实现C代码控制GPIO呢? 如果你使用过单片机,你可能还记得操作GPIO,直接去给对应的寄存器赋值就好了,没错思路是对的;那么我们如何通过Ubuntu系统去写芯片GPIO的寄存器呢? 这里我直接使用mmap的办法,即内存映射,暂时就不发散用户态如何调用到内核态的方法了,后续写关于嵌入式的知识时再介绍. 那么我们看看mmap是做什么用处的: 简单去讲,就是虚拟地址映射到实际物理地址的方法;我们知道在单片机上面操作的寄存器地址,实际上就是它的物理地址;但是嵌入式系统不一样,嵌入式系统有一个内存管理的机制,我们叫MMU,具体MMU的原理暂时也不发散了,后续有机会再介绍(后面会专门再写一篇关于MMU的文章). 通过查询芯片的Datasheet,我们可以找到GPIO的实际寄存器地址,然后读取出来后,就可以像单片机操作GPIO那样去写程序了,这里我贴R2的例子: 我们要操作的GPIO口是这些: 上面这个例子就实现了用户态操作GPIO的方法,具体地址,和运算方法跟你的芯片GPIO寄存器定义有关,看到这里如果有很多东西还是不太明白也没有关系,因为这里涉及的知识面稍微多一些,不过不要灰心,自己多实战,再回过头来看其实就变简单了,关于嵌入式的学习也欢迎大家一起留言交流. 更多的实现请大家看github上的commit记录:https://github.com/BPI-SINOVOIP/RPi.GPIO/commits/master 【玩转开源】BananaPi R2——移植RPi.GPIO 到 R2 标签:原理图 用户 ast 根据 取数 one 效果 str path 原文地址:https://www.cnblogs.com/topbin/p/10577137.html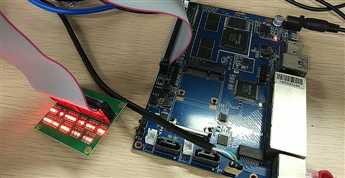
这里如果不清楚如何安装一个Ubuntu镜像到R2,欢迎留言。
1 sudo apt-get update
2 sudo apt-get install python-dev python3-dev
sudo python setup.py install
或者是 sudo python3 setup.py install 来安装
(前者是使用Python2.X,后者是Python3.X)
#!/usr/bin/python
import RPi.GPIO as GPIO #这里导入RPi.GPIO模块,重命名为GPIO
import time #为了方便理解import xxx, 大家可以当作是C语言的#include
#定义两组要控制的Led GPIO pin数组
phy_led2
#这里是一个for循环, 从GPIO.RPI_INFO.items里面读取数据,并打印出来
for key,val in GPIO.RPI_INFO.items():
print ‘%s => %s‘%(key,val)
#读取键盘输入
response = raw_input(‘\nIs this board info correct (y/n) ? ‘).upper()
#调用GPIO.setmode方法,并传入参数GPIO.BOARD
#(这里大家肯定看得一愣一愣的,这些GPIO.XXX方法,参数究竟是在哪里定义的,不要急,后面就会介绍)
GPIO.setmode(GPIO.BOARD)
#读取phy_led数组,并调用GPIO.setup方法,传入参数pin和GPIO.OUT
for pin in phy_led:
print pin, "GPIO.setup GPIO.OUT"
GPIO.setup(pin, GPIO.OUT)
#这里是一个死循环,意思就是设置GPIO循环输出高低电平不断打开,关闭LED
while True:
for pin in phy_led:
GPIO.output(pin, True)
print ‘on ‘, pin
time.sleep(.1)
for pin in phy_led:
GPIO.output(pin, False)
print ‘off ‘,pin
time.sleep(.1)
#如果大家对Python不太熟悉,建议可以先去学习一些基础的语法,这样有助于理解。
#不过不熟悉也没有关系,这里我也会尽量讲明白这个Python文件是在做什么。我的开发环境是Ubuntu,使用的IDE是SourceInsight


for key,val in GPIO.RPI_INFO.items():
print ‘%s => %s‘%(key,val)
board_info = Py_BuildValue("{sissssssssss}",
"P1_REVISION",rpiinfo.p1_revision,
"REVISION",&rpiinfo.revision,
"TYPE",rpiinfo.type,
"MANUFACTURER",rpiinfo.manufacturer,
"PROCESSOR",rpiinfo.processor,
"RAM",rpiinfo.ram);


这里插入两个知识点:用户态,内核态
Linux系统运行的时候实际上是分内核态和用户态的,内核态和用户态之间相互分隔,但是可以通过一些特殊的接口让他们之间相互访问。
比如我们进到Ubuntu系统,GUI,桌面软件,命令行等等这些实际上都是用户态的操作。
一般涉及到较深层次的硬件驱动接口时,才会去操作内核态,比如我们开发嵌入式拿到的BSP代码,去写的各个硬件驱动代码一般就是属于内核部分。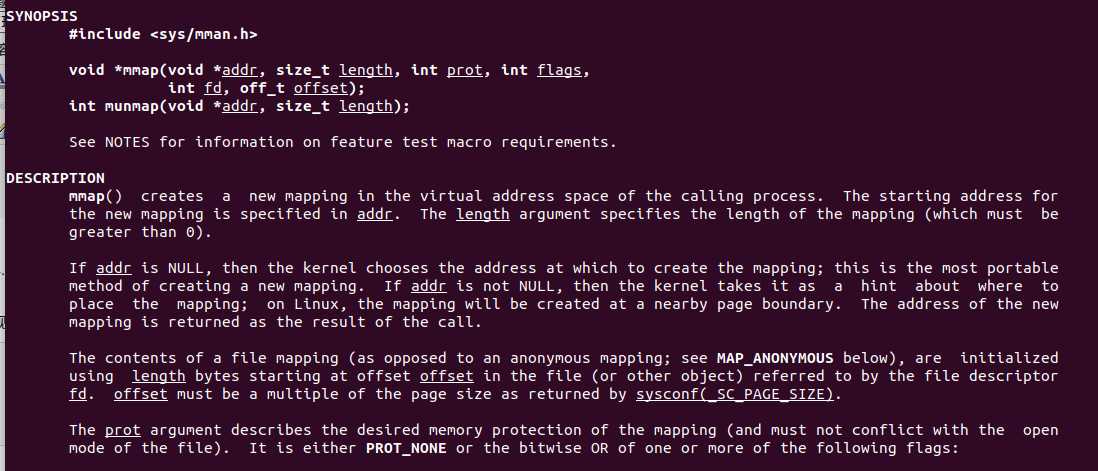
#include
//这里定义GPIO 原理图里面的 PIN
int pins[] = {75, 76, 206, 80, 79, 205, 56, 55, 54, 57, 126, 74, 73, 49, 202,
82, 81, 24, 25, 21, 18, 53, 20, 58, 72, 19, 22, 200};
//芯片GPIO寄存器
#define GPIO_DOUT_BASE_OFFSET 0x500
#define GPIO_MODE_BASE_OFFSET 0x760
#define GPIO_REG_BASE 0x10005000
static int gpio_mmap(void)
{
if ((gpio_mmap_fd = open(MMAP_PATH, O_RDWR|O_SYNC)) 0) {
fprintf(stderr, "unable to open mmap file");
return -1;
}
gpio_mmap_reg = (uint8_t*) mmap(NULL, 1024, PROT_READ | PROT_WRITE,
MAP_FILE | MAP_SHARED , gpio_mmap_fd, GPIO_REG_BASE);
if (gpio_mmap_reg == MAP_FAILED) {
perror("foo");
fprintf(stderr, "failed to mmap");
gpio_mmap_reg = NULL;
close(gpio_mmap_fd);
return -1;
}
return 0;
}
int main()
{
int ret = -1;
int pin = 75;
if (gpio_mmap())
return -1;
printf("set dir\n");
uint32_t tmp;
int position = 0;
//SET MODE AS GPIO,GPIO模式的值为0
printf("BASEADDR=%X\nSET MODE AS GPIO\n", gpio_mmap_reg);
for(int i = 0; i sizeof(pins)/sizeof(int); i++){
pin = pins[i];
position = gpio_mmap_reg + GPIO_MODE_BASE_OFFSET + (pin / 5) * 16;
printf("pin=%d, positon = %X\n", pin, position);
tmp = *(volatile uint32_t*)(position);
tmp &= ~(1u 5) * 3)); //赋值为0
*(volatile uint32_t*)(position) = tmp;
}
printf("\nSET DIR AS OUT\n");
for(int i = 0; i sizeof(pins)/sizeof(int); i++){
pin = pins[i];
if(pin 199){
position = gpio_mmap_reg + (pin / 16) * 16;
}else{
position = gpio_mmap_reg + (pin / 16) * 16 + 0x10;
}
printf("pin=%d, positon = %X\n", pin, position);
tmp = *(volatile uint32_t*)(position);
tmp |= (1u 16));
*(volatile uint32_t*)(position) = tmp;
usleep(100000);
}
//SET VAULE
printf("\nSET VALUE AS HIGH LEVEL\n");
for(int i = 0; i sizeof(pins)/sizeof(int); i++){
pin = pins[i];
position = gpio_mmap_reg + GPIO_DOUT_BASE_OFFSET + (pin / 16) * 16;
printf("pin=%d, positon = %X\n", pin, position);
tmp = *(volatile uint32_t*)(position);
tmp |= (1u 16));
*(volatile uint32_t*)(position) = tmp;
usleep(100000);
}
printf("\nSET VALUE AS LOW LEVEL\n");
for(int i = 0; i sizeof(pins)/sizeof(int); i++){
pin = pins[i];
position = gpio_mmap_reg + GPIO_DOUT_BASE_OFFSET + (pin / 16) * 16;
printf("pin=%d, positon = %X\n", pin, position);
tmp = *(volatile uint32_t*)(position);
printf("tmp = %X\n", tmp);
tmp &= ~(1u 16));
printf("tmp = %X\n", tmp);
*(volatile uint32_t*)(position) = tmp;
usleep(100000);
}
close(gpio_mmap_fd);
}
文章标题:【玩转开源】BananaPi R2——移植RPi.GPIO 到 R2
文章链接:http://soscw.com/essay/93411.html