3. OpenCV-Python——图像梯度算法、边缘检测、图像金字塔与轮廓检测、直方图与傅里叶变换
2020-12-27 04:29
标签:gray hold 外部 像素 推荐 结束 保存 ima hiera dst = cv2.Sobel(src, ddepth, dx, dy, ksize) 用lena图像来实际操作一下: (1)Scharr算子 (2)Laplacian算子 (3)不同算子之间的差距 1) 使用高斯滤波器,以平滑图像,滤除噪声。 2) 计算图像中每个像素点的梯度强度和方向。 3) 应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。 4) 应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。 5) 通过抑制孤立的弱边缘最终完成边缘检测。 (1)高斯金字塔:向下采样方法(缩小) (2)高斯金字塔:向上采样方法(放大) cv2.findContours(img,mode,method) mode:轮廓检索模式 method:轮廓逼近方法 为提高准确性,使用二值图像。 (1)边界矩形 (2)外接圆 3. OpenCV-Python——图像梯度算法、边缘检测、图像金字塔与轮廓检测、直方图与傅里叶变换 标签:gray hold 外部 像素 推荐 结束 保存 ima hiera 原文地址:https://www.cnblogs.com/fengxb1213/p/13020202.html一、图像梯度算法
1、图像梯度-Sobel算子

1 # *******************图像梯度算法**********************开始
2 import cv2
3 # import numpy as np
4
5 img = cv2.imread(‘pie.png‘,cv2.IMREAD_GRAYSCALE)
6 cv2.imshow("img",img)
7 cv2.waitKey()
8 cv2.destroyAllWindows()
9
10 # 显示图像函数
11 def cv_show(img,name):
12 cv2.imshow(name,img)
13 cv2.waitKey()
14 cv2.destroyAllWindows()
15
16 # Sobel算子——x轴
17 sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3) # 计算水平的
18 cv_show(sobelx,‘sobelx‘)
19
20 # 白到黑是正数,黑到白就是负数了,所有的负数会被截断成0,所以要取绝对值
21 sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
22 sobelx = cv2.convertScaleAbs(sobelx) # 取绝对值
23 cv_show(sobelx,‘sobelx‘)
24
25 # Sobel算子——y轴
26 sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
27 sobely = cv2.convertScaleAbs(sobely) # 取绝对值
28 cv_show(sobely,‘sobely‘)
29
30 # 求和
31 sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0) # 按权重计算
32 cv_show(sobelxy,‘sobelxy‘)
33
34 # 也有直接计算xy轴的————不推荐使用
35 # sobelxy=cv2.Sobel(img,cv2.CV_64F,1,1,ksize=3)
36 # sobelxy = cv2.convertScaleAbs(sobelxy)
37 # cv_show(sobelxy,‘sobelxy‘)
38 # *******************图像梯度算法**********************结束
1 # *******************图像梯度算法-实际操作**********************开始
2 import cv2
3
4 # 显示图像函数
5 def cv_show(img,name):
6 cv2.imshow(name,img)
7 cv2.waitKey()
8 cv2.destroyAllWindows()
9
10 img = cv2.imread(‘lena.jpg‘,cv2.IMREAD_GRAYSCALE)
11 cv_show(img,‘img‘)
12
13 # 分别计算x和y
14 img = cv2.imread(‘lena.jpg‘,cv2.IMREAD_GRAYSCALE)
15 sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
16 sobelx = cv2.convertScaleAbs(sobelx)
17 sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
18 sobely = cv2.convertScaleAbs(sobely)
19 sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
20 cv_show(sobelxy,‘sobelxy‘)
21 # *******************图像梯度算法-实际操作**********************结束


2、图像梯度-Scharr和Laplacian算子

1 # *******************图像梯度算子-Scharr+laplacian**********************开始
2 import cv2
3 import numpy as np
4
5 #不同算子的差异
6 img = cv2.imread(‘lena.jpg‘,cv2.IMREAD_GRAYSCALE)
7 sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
8 sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
9 sobelx = cv2.convertScaleAbs(sobelx)
10 sobely = cv2.convertScaleAbs(sobely)
11 sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
12
13 scharrx = cv2.Scharr(img,cv2.CV_64F,1,0)
14 scharry = cv2.Scharr(img,cv2.CV_64F,0,1)
15 scharrx = cv2.convertScaleAbs(scharrx)
16 scharry = cv2.convertScaleAbs(scharry)
17 scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0)
18
19 laplacian = cv2.Laplacian(img,cv2.CV_64F)
20 laplacian = cv2.convertScaleAbs(laplacian)
21
22 res = np.hstack((sobelxy,scharrxy,laplacian))
23
24 # 显示图像函数
25 def cv_show(img,name):
26 cv2.imshow(name,img)
27 cv2.waitKey()
28 cv2.destroyAllWindows()
29 cv_show(res,‘res‘)
30 # *******************图像梯度算子-Scharr+laplacian**********************结束

二、边缘检测
Canny边缘检测
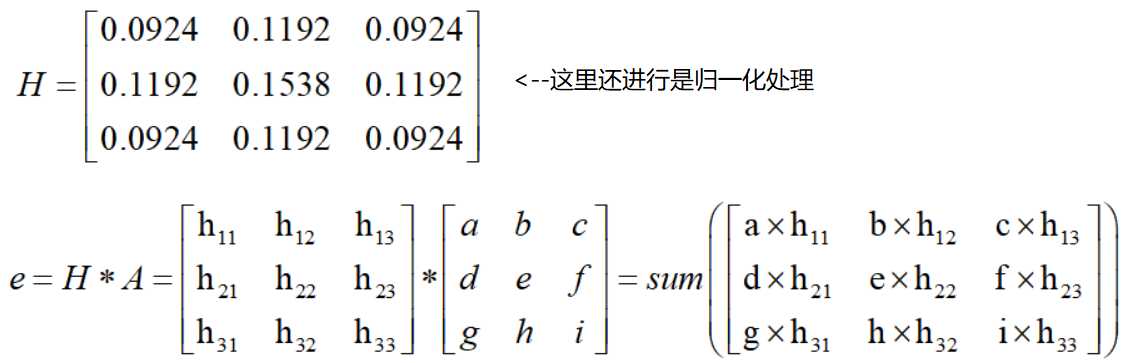
1、高斯滤波器
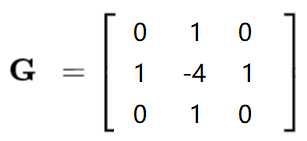
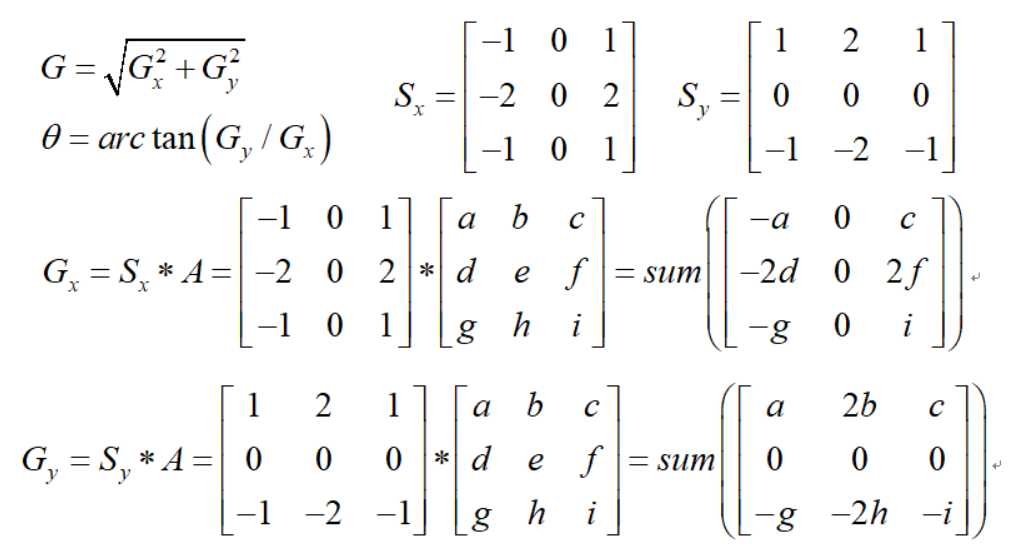
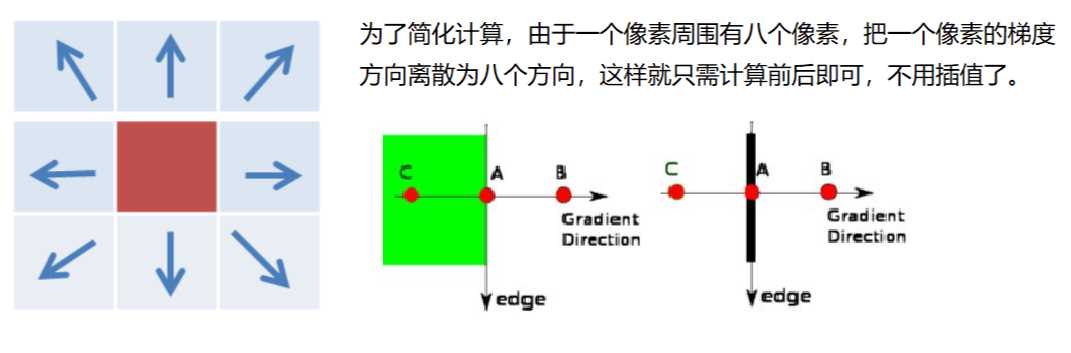
2、梯度和方向
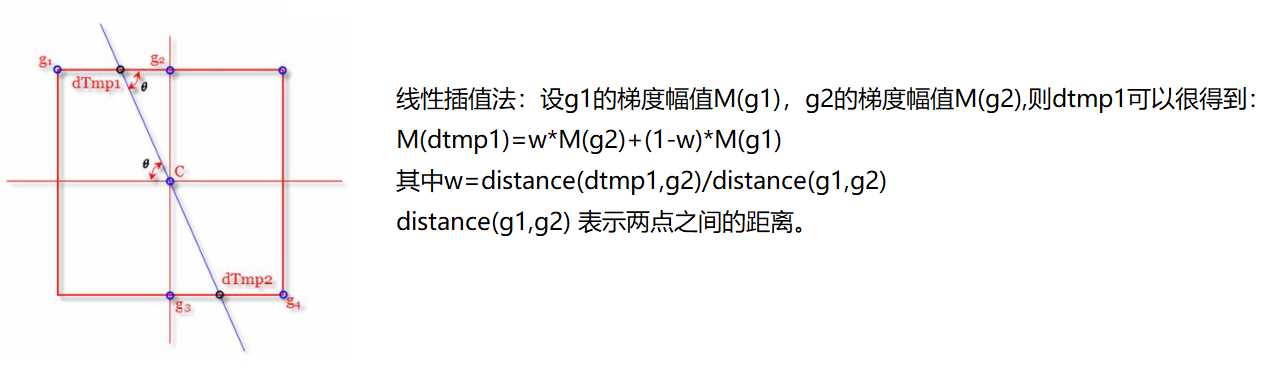
3、非极大值抑制
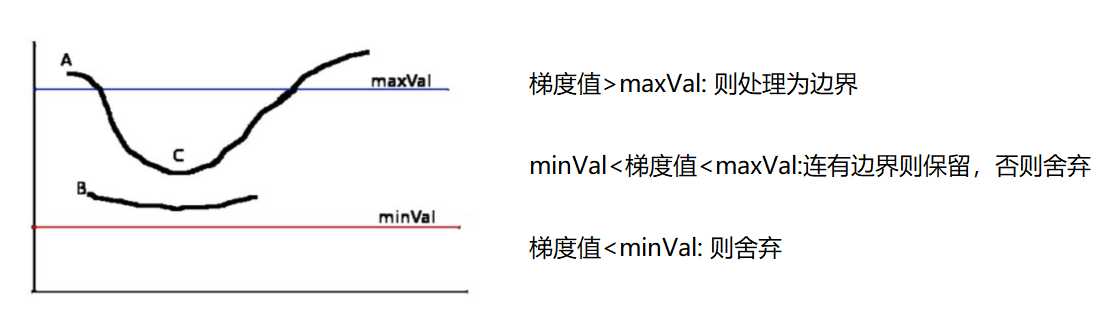
4、双阈值检测
1 # *******************边缘检测**********************开始
2 import cv2
3 import numpy as np
4
5 img=cv2.imread("lena.jpg",cv2.IMREAD_GRAYSCALE)
6
7 v1=cv2.Canny(img,80,150) # 设置双阈值 最小和最大
8 v2=cv2.Canny(img,50,100)
9
10 res = np.hstack((v1,v2))
11
12 # 显示图像函数
13 def cv_show(img,name):
14 cv2.imshow(name,img)
15 cv2.waitKey()
16 cv2.destroyAllWindows()
17 cv_show(res,‘res‘)
18 # *******************边缘检测**********************结束

三、图像金字塔
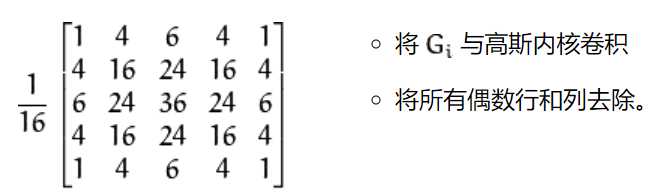
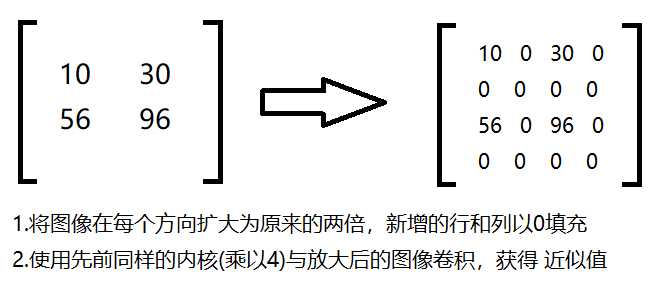
1、高斯金字塔
1 # *******************图像金字塔--高斯金字塔**********************开始
2 import cv2
3 import numpy as np
4
5 # 显示图像函数
6 def cv_show(img,name):
7 cv2.imshow(name,img)
8 cv2.waitKey()
9 cv2.destroyAllWindows()
10
11 img=cv2.imread("AM.png")
12 # cv_show(img,‘img‘)
13 print (img.shape)
14
15 # 高斯金字塔-上采样 (可执行多次)
16 up=cv2.pyrUp(img)
17 # cv_show(up,‘up‘)
18 print (up.shape)
19
20 # 高斯金字塔-下采样 (可执行多次)
21 down=cv2.pyrDown(img)
22 # cv_show(down,‘down‘)
23 print (down.shape)
24
25 # 高斯金字塔-先上采样再下采样 (会损失信息-变模糊)
26 up=cv2.pyrUp(img)
27 up_down=cv2.pyrDown(up)
28 # cv_show(up_down,‘up_down‘)
29 cv_show(np.hstack((img,up_down)),‘up_down‘)
30 # *******************图像金字塔--高斯金字塔**********************结束

2、拉普拉斯金字塔
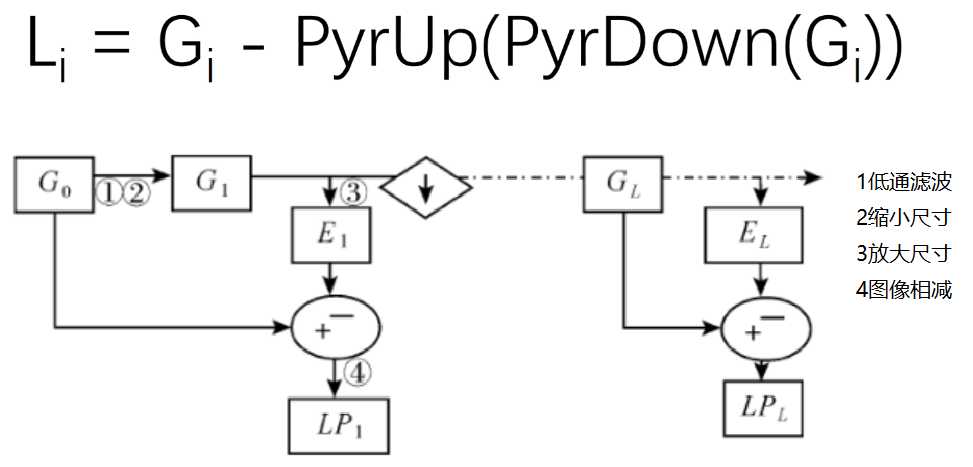
1 # *******************图像金字塔-拉普拉斯金字塔**********************开始
2 import cv2
3 import numpy as np
4
5 # 显示图像函数
6 def cv_show(img,name):
7 cv2.imshow(name,img)
8 cv2.waitKey()
9 cv2.destroyAllWindows()
10
11 img=cv2.imread("AM.png")
12 down=cv2.pyrDown(img)
13 down_up=cv2.pyrUp(down)
14 l_1=img-down_up
15 cv_show(l_1,‘l_1‘)
16 # *******************图像金字塔-拉普拉斯金字塔**********************结束
四、图像轮廓
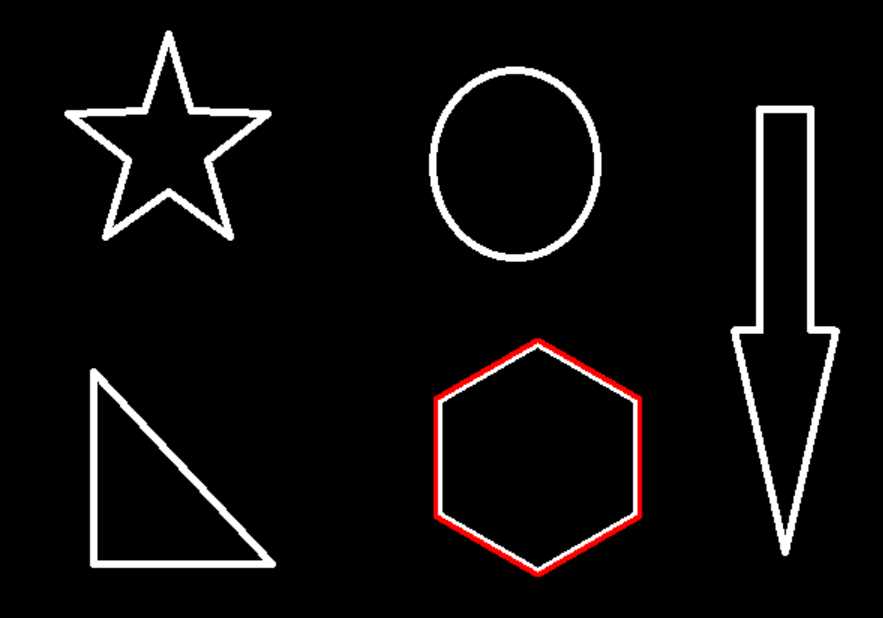
1、轮廓检测及绘制
1 # *******************图像轮廓**********************开始
2 import cv2
3 import numpy as np
4
5 # 读入图像转换为二值图像
6 img = cv2.imread(‘contours.png‘)
7 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转换为灰度图
8 ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 转换成二值图
9
10 # 显示图像函数
11 def cv_show(img,name):
12 cv2.imshow(name,img)
13 cv2.waitKey()
14 cv2.destroyAllWindows()
15 # cv_show(thresh,‘thresh‘)
16
17 # 轮廓检测 第一个就是二值的结果 第二个是一堆轮廓点 第三个是层级
18 binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
19
20 # 绘制轮廓
21 draw_img = img.copy() # 注意需要copy,要不原图会变。。。
22 res = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2) # 传入绘制图像,轮廓,轮廓索引(-1全部),颜色模式,线条厚度
23 # cv_show(res,‘res‘)
24
25 draw_img = img.copy()
26 res = cv2.drawContours(draw_img, contours, 2, (0, 0, 255), 2)
27 cv_show(res,‘res‘)
28 # *******************图像轮廓**********************结束
2、轮廓特征
1 import cv2
2
3 # 读入图像转换为二值图像
4 img = cv2.imread(‘contours.png‘)
5 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转换为灰度图
6 ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 转换成二值图
7
8 # 轮廓检测 第一个就是二值的结果 第二个是一堆轮廓点 第三个是层级
9 binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
10
11 # 绘制轮廓
12 draw_img = img.copy()
13 res = cv2.drawContours(draw_img, contours, 2, (0, 0, 255), 2)
14
15 # 轮廓特征
16 cnt = contours[0] # 获取轮廓
17 print(cv2.contourArea(cnt)) # 计算面积
18 print(cv2.arcLength(cnt, True)) # 计算周长,True表示闭合的
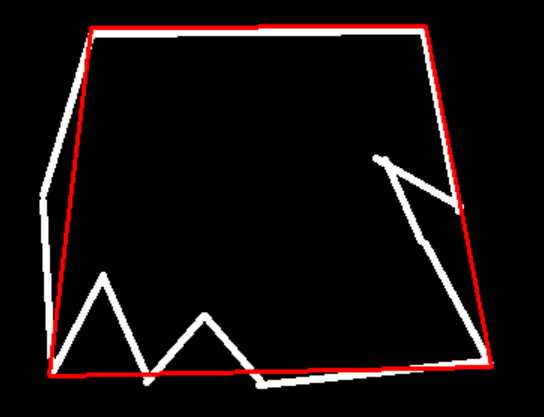
3、轮廓近似

1 import cv2
2
3 img = cv2.imread(‘contours2.png‘)
4 # 显示图像函数
5 def cv_show(img,name):
6 cv2.imshow(name,img)
7 cv2.waitKey()
8 cv2.destroyAllWindows()
9
10 # 二值+轮廓检测
11 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
12 ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
13 binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
14 cnt = contours[0]
15 # 轮廓绘制
16 draw_img = img.copy()
17 res = cv2.drawContours(draw_img, [cnt], -1, (0, 0, 255), 2)
18 # cv_show(res,‘res‘)
19
20 # 轮廓近似
21 epsilon = 0.05*cv2.arcLength(cnt,True)
22 approx = cv2.approxPolyDP(cnt,epsilon,True)
23
24 draw_img = img.copy()
25 res = cv2.drawContours(draw_img, [approx], -1, (0, 0, 255), 2)
26 cv_show(res,‘res‘)
1 # *******************图像轮廓-边界矩形**********************开始
2 import cv2
3
4 # 显示图像函数
5 def cv_show(img,name):
6 cv2.imshow(name,img)
7 cv2.waitKey()
8 cv2.destroyAllWindows()
9
10 img = cv2.imread(‘contours.png‘)
11
12 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
13 ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
14 binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
15 cnt = contours[0]
16
17 # 边界矩形
18 x,y,w,h = cv2.boundingRect(cnt)
19 img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
20 cv_show(img,‘img‘)
21 # 轮廓面积与边界矩形比
22 area = cv2.contourArea(cnt)
23 x, y, w, h = cv2.boundingRect(cnt)
24 rect_area = w * h
25 extent = float(area) / rect_area
26 print (‘轮廓面积与边界矩形比‘,extent)
27 # *******************图像轮廓-边界矩形**********************结束
1 # 外接圆
2 (x,y),radius = cv2.minEnclosingCircle(cnt)
3 center = (int(x),int(y))
4 radius = int(radius)
5 img = cv2.circle(img,center,radius,(0,255,0),2)
6 cv_show(img,‘img‘)
上一篇:Python_函数术语列表
文章标题:3. OpenCV-Python——图像梯度算法、边缘检测、图像金字塔与轮廓检测、直方图与傅里叶变换
文章链接:http://soscw.com/index.php/essay/38507.html