CenterNet 数据加载解析
2021-01-14 22:14
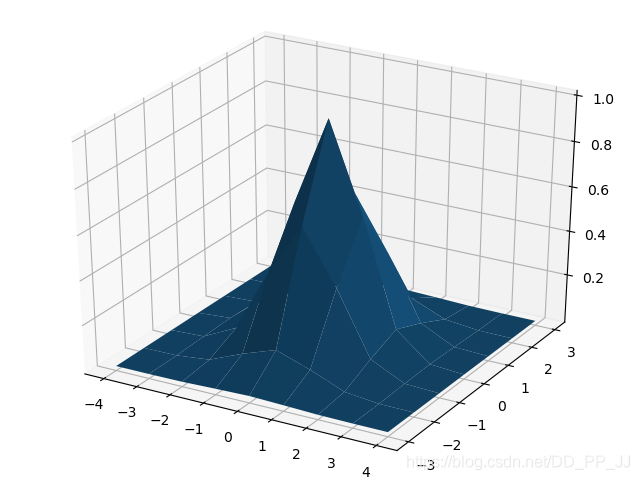
标签:越界 gauss Nid 循环 置信度 proc overlap orm 构建 本文主要解读CenterNet如何加载数据,并将标注信息转化为CenterNet规定的高斯分布的形式。 CenterNet和Anchor-Based的方法不同,以YOLOv3为例,大致梳理一下模型的框架和数据处理流程。 YOLOv3是一个经典的单阶段的目标检测算法,图片进入网络的流程如下: CenterNet是一个经典的Anchor-Free目标检测方法,图片进入网络流程如下: 设输入图片为\(I\in R^{W\times H\times 3}\), W代表图片的宽,H代表高。CenterNet的输出是一个关键点热图heatmap。 其中R代表输出的stride大小,C代表关键点的类型的个数。 举个例子,在COCO数据集目标检测中,R设置为4,C的值为80,代表80个类别。 如果\(\hat{Y}_{x,y,c}=1\)代表检测到一个物体,表示对类别c来说,(x,y)这个位置检测到了c类的目标。 既然输出是热图,标签构建的ground truth也必须是热图的形式。标注的内容一般包含(x1,y1,x2,y2,c),目标框左上角坐标、右下角坐标和类别c,按照以下流程转为ground truth: 其中\(\sigma_p\)是一个与目标大小相关的标准差(代码中设置的是)。对于特殊情况,相同类别的两个高斯分布发生了重叠,重叠元素间最大的值作为最终元素。下图是知乎用户OLDPAN分享的高斯分布图。 datasets/pascal.py 的代码主要从getitem函数入手,以下代码已经做了注释,其中最重要的两个部分一个是如何获取高斯半径(gaussian_radius函数),一个是如何将高斯分布分散到heatmap上(draw_umich_gaussian函数)。 heatmap上使用高斯核有很多需要注意的细节。CenterNet官方版本实际上是在CornerNet的基础上改动得到的,有很多祖传代码。 在使用高斯核前要考虑这样一个问题,下图来自于CornerNet论文中的图示,红色的是标注框,但绿色的其实也可以作为最终的检测结果保留下来。那么这个问题可以转化为绿框在红框多大范围以内可以被接受。使用IOU来衡量红框和绿框的贴合程度,当两者IOU>0.7的时候,认为绿框也可以被接受,反之则不被接受。 那么现在问题转化为,如何确定半径r, 让红框和绿框的IOU大于0.7。 以上是三种情况,其中蓝框代表标注框,橙色代表可能满足要求的框。这个问题最终变为了一个一元二次方程有解的问题,同时由于半径必须为正数,所以r的取值就可以通过求根公式获得。 可以看到这里的公式和上图计算的结果是一致的,需要说明的是,CornerNet最开始版本中这里出现了错误,分母不是2a,而是直接设置为2。CenterNet也延续了这个bug,CenterNet作者回应说这个bug对结果的影响不大,但是根据issue的讨论来看,有一些人通过修正这个bug以后,可以让AR提升1-3个百分点。以下是有bug的版本,CornerNet最新版中已经修复了这个bug。 同时有一些人认为圆并不普适,提出了使用椭圆来进行计算,也有人在issue中给出了推导,感兴趣的可以看以下链接:https://github.com/princeton-vl/CornerNet/issues/110 使用matplotlib对gaussian2D进行可视化。 [1]https://zhuanlan.zhihu.com/p/66048276 [2]https://www.cnblogs.com/shine-lee/p/9671253.html [3]https://zhuanlan.zhihu.com/p/96856635 [4]http://xxx.itp.ac.cn/pdf/1808.01244 [5]https://github.com/princeton-vl/CornerNet/issues/110 CenterNet 数据加载解析 标签:越界 gauss Nid 循环 置信度 proc overlap orm 构建 原文地址:https://www.cnblogs.com/pprp/p/13404184.html1. YOLOv3和CenterNet流程对比
2. CenterNet部分详解

3. 代码部分
def __getitem__(self, index):
img_id = self.images[index]
img_path = os.path.join(
self.img_dir, self.coco.loadImgs(ids=[img_id])[0][‘file_name‘])
ann_ids = self.coco.getAnnIds(imgIds=[img_id])
annotations = self.coco.loadAnns(ids=ann_ids)
labels = np.array([self.cat_ids[anno[‘category_id‘]]
for anno in annotations])
bboxes = np.array([anno[‘bbox‘]
for anno in annotations], dtype=np.float32)
if len(bboxes) == 0:
bboxes = np.array([[0., 0., 0., 0.]], dtype=np.float32)
labels = np.array([[0]])
bboxes[:, 2:] += bboxes[:, :2] # xywh to xyxy
img = cv2.imread(img_path)
height, width = img.shape[0], img.shape[1]
# 获取中心坐标p
center = np.array([width / 2., height / 2.],
dtype=np.float32) # center of image
scale = max(height, width) * 1.0 # 仿射变换
flipped = False
if self.split == ‘train‘:
# 随机选择一个尺寸来训练
scale = scale * np.random.choice(self.rand_scales)
w_border = get_border(128, width)
h_border = get_border(128, height)
center[0] = np.random.randint(low=w_border, high=width - w_border)
center[1] = np.random.randint(low=h_border, high=height - h_border)
if np.random.random() 0 and w > 0:
obj_c = np.array([(bbox[0] + bbox[2]) / 2, (bbox[1] + bbox[3]) / 2],
dtype=np.float32) # 中心坐标-浮点型
obj_c_int = obj_c.astype(np.int32) # 整型的中心坐标
# 根据一元二次方程计算出最小的半径
radius = max(0, int(gaussian_radius((math.ceil(h), math.ceil(w)), self.gaussian_iou)))
# 得到高斯分布
draw_umich_gaussian(hmap[label], obj_c_int, radius)
w_h_[k] = 1. * w, 1. * h
# 记录偏移量
regs[k] = obj_c - obj_c_int # discretization error
# 当前是obj序列中的第k个 = fmap_w * cy + cx = fmap中的序列数
inds[k] = obj_c_int[1] * self.fmap_size[‘w‘] + obj_c_int[0]
# 进行mask标记
ind_masks[k] = 1
return {‘image‘: img, ‘hmap‘: hmap, ‘w_h_‘: w_h_, ‘regs‘: regs,
‘inds‘: inds, ‘ind_masks‘: ind_masks, ‘c‘: center,
‘s‘: scale, ‘img_id‘: img_id}
4. heatmap上应用高斯核

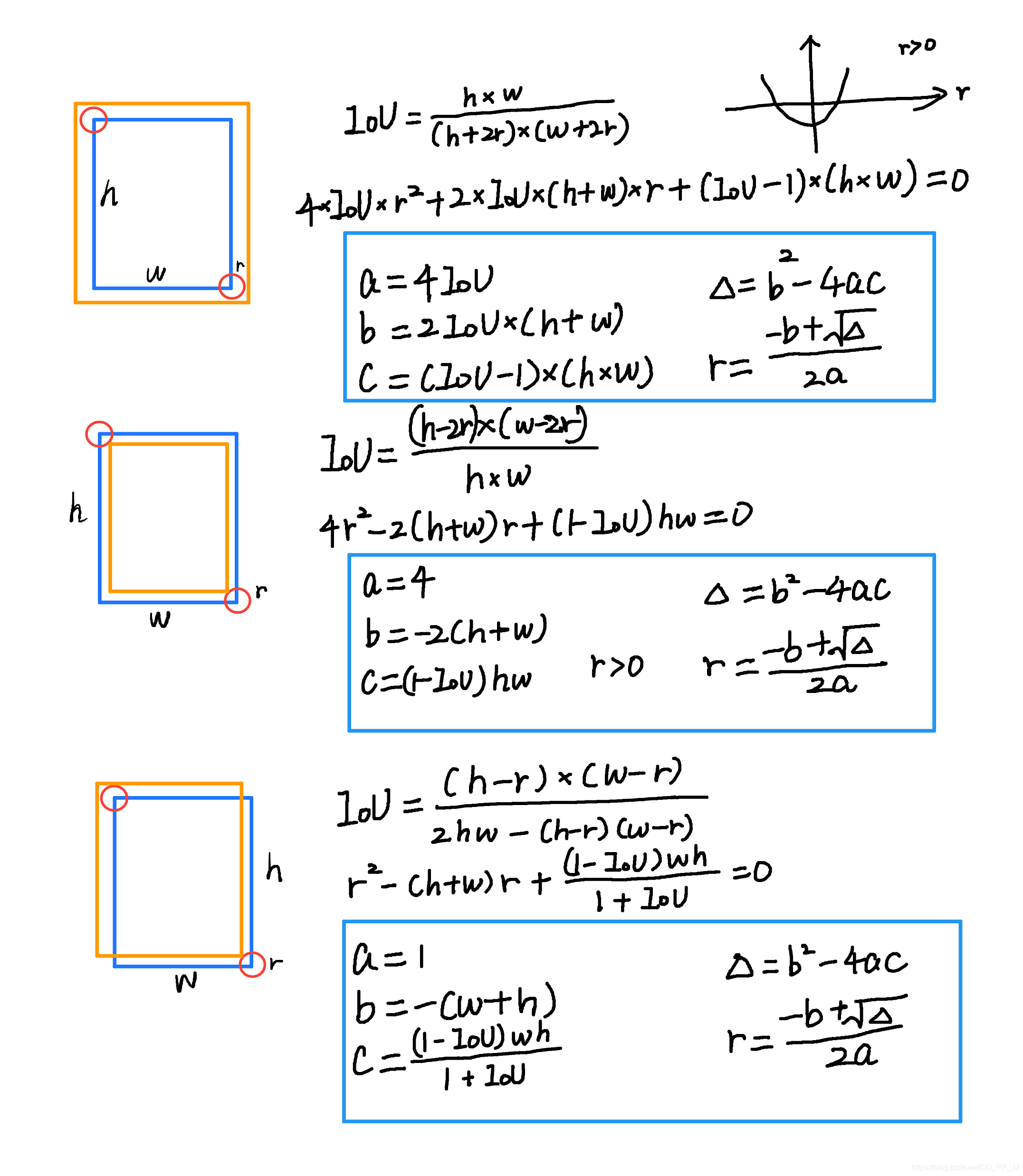
def gaussian_radius(det_size, min_overlap=0.7):
# gt框的长和宽
height, width = det_size
a1 = 1
b1 = (height + width)
c1 = width * height * (1 - min_overlap) / (1 + min_overlap)
sq1 = np.sqrt(b1 ** 2 - 4 * a1 * c1)
r1 = (b1 + sq1) / (2 * a1)
a2 = 4
b2 = 2 * (height + width)
c2 = (1 - min_overlap) * width * height
sq2 = np.sqrt(b2 ** 2 - 4 * a2 * c2)
r2 = (b2 + sq2) / (2 * a2)
a3 = 4 * min_overlap
b3 = -2 * min_overlap * (height + width)
c3 = (min_overlap - 1) * width * height
sq3 = np.sqrt(b3 ** 2 - 4 * a3 * c3)
r3 = (b3 + sq3) / (2 * a3)
return min(r1, r2, r3)
def gaussian_radius(det_size, min_overlap=0.7):
height, width = det_size
a1 = 1
b1 = (height + width)
c1 = width * height * (1 - min_overlap) / (1 + min_overlap)
sq1 = np.sqrt(b1 ** 2 - 4 * a1 * c1)
r1 = (b1 + sq1) / 2
a2 = 4
b2 = 2 * (height + width)
c2 = (1 - min_overlap) * width * height
sq2 = np.sqrt(b2 ** 2 - 4 * a2 * c2)
r2 = (b2 + sq2) / 2
a3 = 4 * min_overlap
b3 = -2 * min_overlap * (height + width)
c3 = (min_overlap - 1) * width * height
sq3 = np.sqrt(b3 ** 2 - 4 * a3 * c3)
r3 = (b3 + sq3) / 2
return min(r1, r2, r3)
5. 高斯分布添加到heatmap上
def gaussian2D(shape, sigma=1):
m, n = [(ss - 1.) / 2. for ss in shape]
y, x = np.ogrid[-m:m + 1, -n:n + 1]
h = np.exp(-(x * x + y * y) / (2 * sigma * sigma))
h[h 0 and min(masked_heatmap.shape) > 0: # TODO debug
np.maximum(masked_heatmap, masked_gaussian * k, out=masked_heatmap)
# 将高斯分布覆盖到heatmap上,相当于不断的在heatmap基础上添加关键点的高斯,
# 即同一种类型的框会在一个heatmap某一个类别通道上面上面不断添加。
# 最终通过函数总体的for循环,相当于不断将目标画到heatmap
return heatmap
import numpy as np
y,x = np.ogrid[-4:5,-3:4]
sigma = 1
h=np.exp(-(x*x+y*y)/(2*sigma*sigma))
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure()
ax = Axes3D(fig)
ax.plot_surface(x,y,h)
plt.show()
6. 参考