GJK碰撞检测算法
2021-01-29 20:24
标签:img 介绍 pos 现在 图片 build 中比 技术 static https://blog.lufei.so/#/collisionDetection/GJK/1 https://blog.lufei.so/#/collisionDetection/GJK/2 现实世界里我们对于是否碰撞的判断可以说极其容易而且准确,比如下图。在二进制的世界里,一切就没这么直观了。 实际上就我目前了解的碰撞检测算法,应用对象都是凸多边形( 游戏里对于不规则物体,我们通常都是借助工具生成顶点数据。此时生成的数据通常都是处理过的(凹多边形被分解),如果你想了解更多关于凹多边形分解的知识,可以参考这两个库:poly-decomp.js,earcut。 假设有两个凸多边形: 那么它们的位置看起应该像下图这样。 这些点的布局如下图所示: 关键的地方来了。首先要介绍一个新的概念叫 铺垫了这么久,现在可以说结论了。 我们把 有没有觉得很简单?对,原理就是这么简单。 至于怎么算出点集的 
GJK(Gilbert-Johnson-Keerthi Distance Algorithm)
GJK 就是此次要实现的碰撞检测算法。如果对碰撞算法有过了解的话,大概率听过另一个碰撞检测算法 SAT(Separating Axis Theorem)。GJK 相较于 SAT 有什么优点吗?
Convex polygon)。如果不是凸多边形,问题也不大,可以事先分割。
Minkowski Difference
由于不知道
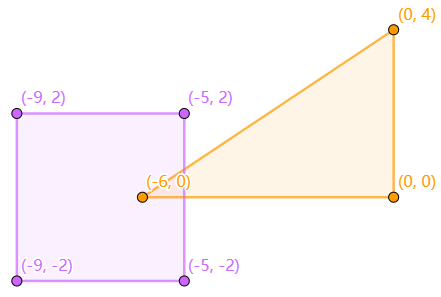
Min 到底是“明”还是“闵”,所以下面都用 MD 表示了。MD 是 GJK 算法的理论基础。那么到底什么是 MD ?s1 =[{x:1, y:10},{x:3, y:10},{x:3, y:8},{x:1, y:8}]
s2 =[{x:2, y:9},{x:4, y:7},{x:2, y:7}]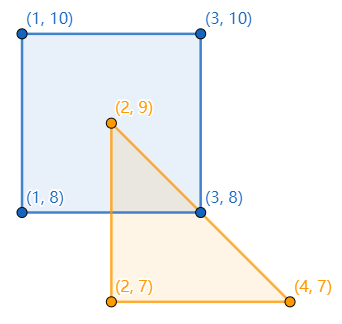
MD 就是 s1 与 s2 所有点的差形成的集合。MD(s1, s2):
s3 =[]for p1 in s1:for p2 in s2:
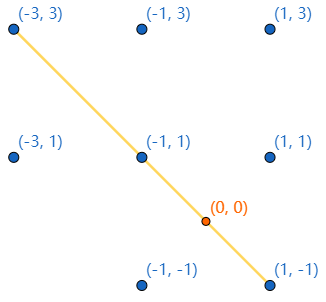
s3.push(p1 - p2)return s3MD(s1, s2)=>[{x:-1, y:1},{x:-3, y:3},{x:-1, y:3},{x:1, y:1},{x:-1, y:3},{x:1, y:3},{x:1, y:-1},{x:-1, y:1},{x:1, y:1},{x:-1, y:-1},{x:-3, y:1},{x:-1, y:1}]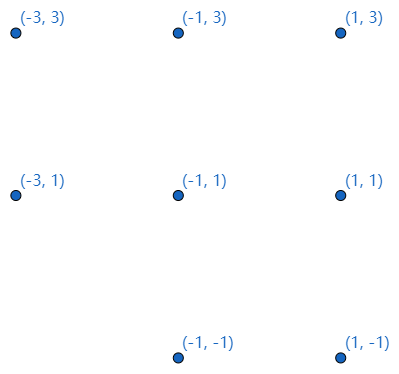
Convex Hull。Convex hull 是包含点集的最小凸多边形。拿上面的例子来说: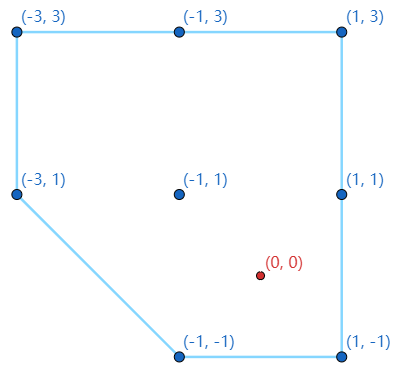
s1 - s2 点集形成的 Convex hull 命名为 s3。如果 s3 包含点 (0, 0),那么 s1 和 s2 发生碰撞。Convex hull,翻译自维基百科的 Gift wrapping algorithm 。functionwrap(points){const hull =[]let current ={x:Infinity}for(const p of points){if(p.x .x) current = p
}let i =0, end
while(true){
hull[i]= current
end = points[0]for(let j =1; j .length; j++){if((end.x === current.x && end.y === current.y)||inline(points[j], hull[i], end)>0){
end = points[j]}}
i +=1
current = end
if(end.x === hull[0].x && end.y === hull[0].y)break}return hull
}
Gift wrapping algorithm 是获取 Convex hull 的一种算法,不是效率最高的但应该是最易懂的。
最后就是判断点是否在多边形内的算法了,可以看我之前的文章。
交互示例
思考
有小伙伴不禁要问:这样的嵌套循环真的比 SAT 快?确实,上面的实现并不是真正意义上的 GJK 算法。但是核心思想是一样的:
如果两个凸多边形的 Minkowski Difference 所形成的 Convex hull 包含点 (0, 0),那么这两个凸多边形相交。
怎么优化这个实现呢?
我们并不需要计算两个凸多边形所有点的 Minkowski Difference。还是文章开始的例子:
我们只需要尽早的从已知的条件里判断出是否包含原点即可。
比如:如果获取到的第一个点刚好是原点,说明相交停止循环,否则继续获取下一个点,如果原点在两点的连线上,说明相交停止循环,否则继续获取下一个点。
真正的 GJK 算法用了一个很取巧的方式来减少循环次数,而且效果很理想。当然这也是下篇文章里的内容了。
感兴趣的小伙伴也可以从下面的参考资料里先尝试一波。
参考资料
- https://blog.hamaluik.ca/posts/building-a-collision-engine-part-1-2d-gjk-collision-detection/
- http://www.dyn4j.org/2010/04/gjk-gilbert-johnson-keerthi/
- https://cse442-17f.github.io/Gilbert-Johnson-Keerthi-Distance-Algorithm/
国际惯例先放图。
GJK 是怎么快速判断出这两个图形是否碰撞的呢?
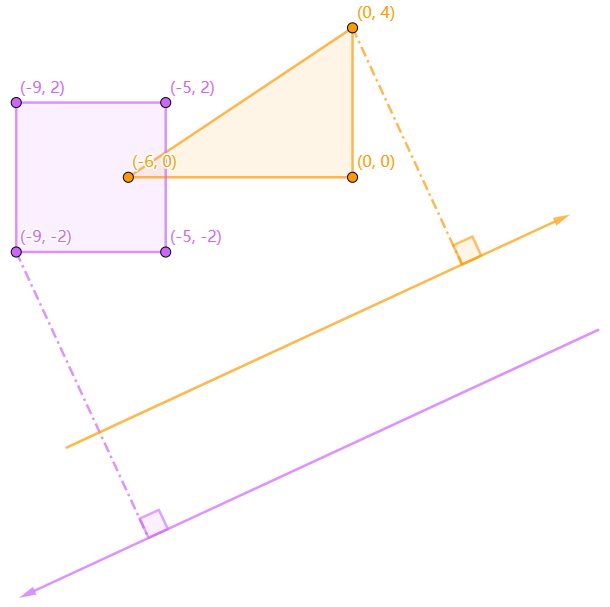
Support Function
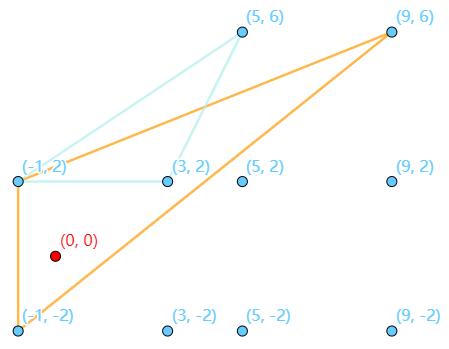
Support Function 用来计算凸体在给定方向上的最远点。什么意思呢?
 代码片段
代码片段
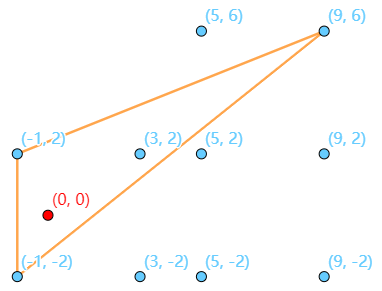
图示中的例子带入,可以得到 (9, 6) = (0, 4) - (-9, -2),正是图二三角形的一个顶点。
将方向取反再调用 getSupport,我们可以得到 (-1, -2) = (-6, 0) - (-5, 2),也是图二三角形的一个顶点。
这样做的意义是什么呢?因为可以确保我们所取的两个点跨度足够大,有更大的概率包含原点,减少循环次数。
那么问题来了:
-
初始给定的方向是怎么来的?
随机。更推荐的是凸体中心的差:
direction = shapeA.center - shapeB.center。 -
已经获取了两个点,那么第三个点如何确定呢?
通过
a(9, 6),b(-1, -2),可以计算出垂直于向量ab(-10, -8)且指向原点方向的向量,这个向量将会作为direction来获取第三个点。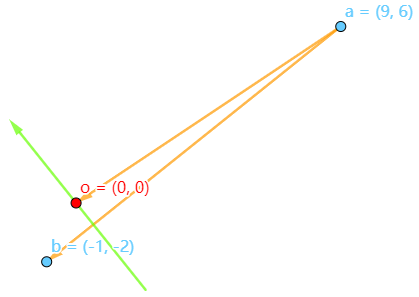
这里要用到向量积来计算出
代码片段direction。
核心算法
获取到三个点后,我们需要判断原点的是否在这三个所形成的多边形内。如果在说明碰撞,不在则剔除一个点后继续寻找下一个点。
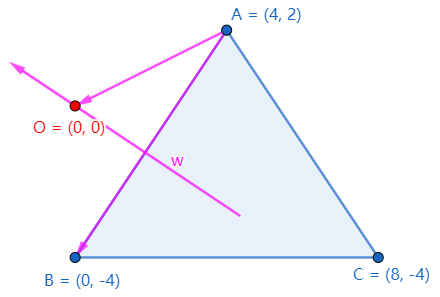
上面这种情况:w * AO > 0,说明原点在 AB 外部,则剔除点 C 并以 w 为 direction 继续寻找下一个点。
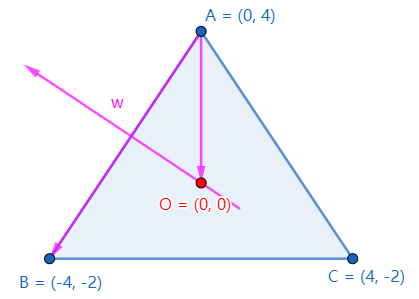
上面这种情况:w * AO ,说明原点在 AB 内部,则验证剩余的边(实际上不需要验证所有的边)。假如我开始获取到的两个点是 B,C,则我们只需要验证 AB,AC,因为原点一定在 BC 内部。
这里的关键点在于:如何计算出垂直于 AB 且指向远离点 C 的方向的向量 w ?
直接贴代码了,毕竟也解释不了为何是这样的运算顺序。
代码片段
交互示例
上面只是介绍了我觉得实现 GJK 算法中比较重要的点。整个流程可能并不够清晰,所以这里附上完整的步骤分解示例。
新标签页中打开
总结
GJK 算法并不复杂,完整的代码不到 200 行。主要用到的数学知识是数量积和向量积。
参考资料
- https://blog.hamaluik.ca/posts/building-a-collision-engine-part-1-2d-gjk-collision-detection/
- http://www.dyn4j.org/2010/04/gjk-gilbert-johnson-keerthi/
- https://cse442-17f.github.io/Gilbert-Johnson-Keerthi-Distance-Algorithm/
GJK碰撞检测算法
标签:img 介绍 pos 现在 图片 build 中比 技术 static
原文地址:https://www.cnblogs.com/alps/p/12822653.html