V-Net网络实现医学图像分割
2021-02-13 23:20
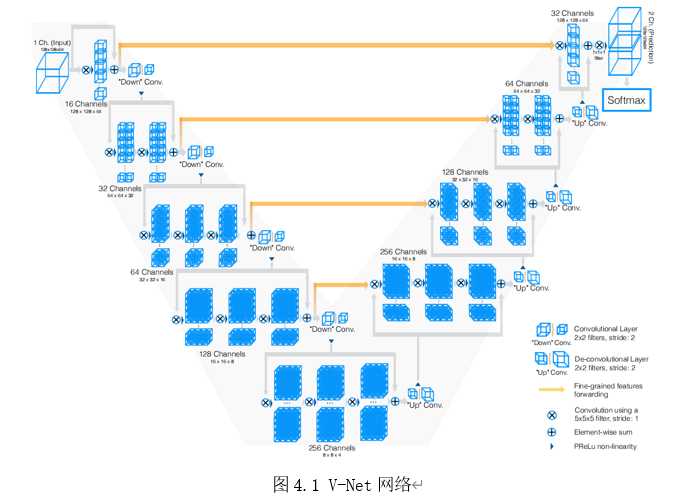
标签:制作 导入 补充 目标 RKE monitor 重要 创建 医学图像 V-Net网络在编码层引入残差结构。残差结构中,除了正常的卷积操作,还将卷积前的输入直接短路连接到输出端,这样网络可以学习到一个残差函数。学习残差可以加速收敛。编码网络用5×5×5卷积来提取图像特征,用步长为2,尺寸为2×2×2的卷积来代替最大池化。由于将模型公式化为残差网络,所以当我们降低它们的分辨率时,用卷积来加倍特征图数量。整个网络的激活函数为PReLu。右侧解码部分利用解码网络提取的特征并恢复图像空间分辨率,最后输出3D分割。最后的卷积层使用1×1×1卷积,得到与输入相同尺寸的输出结果。然后通过softmax层激活,生成目标和背景的概率图。在每一级解码层之后,用反卷积恢复空间分辨率,后接5×5×5卷积,并减半特征图数量。与编码网络一样,解码端也学习残差函数,不断地反卷积,来恢复位置信息,并且通过skip-connection将左侧编码部分各个阶段提取的特征传递到解码部分,以获取更多的图像细节信息,提高预测的准确性。skip-connection在图4-1中由水平连接示意性地表示。通过这种方式,补充了下采样丢失的信息,提高分割精度,同时skip-connection结构的引入还可以减少网络收敛时间。V-Net同样是是一种全卷积网络结构,因此对于输入3D图像没有二维尺寸要求。 V-Net网络实现医学图像分割 标签:制作 导入 补充 目标 RKE monitor 重要 创建 医学图像 原文地址:https://www.cnblogs.com/jinyiyexingzc/p/12996396.htmlV-Net网络是图像分割中以3D结构存在的编解码网络模型
首先,制作训练数据
可以调整深度depth,图像尺寸image_size;可以选择制作某一位病人的训练数据,也可以加入循环,将所有病人切片制作数据集
1 """
2 本程序制作vnet数据集,同一dir中的11张切片作为一组输入
3 服务器存储空间有限,一个dir一个dir进行制作,然后训练
4 """
5 import os
6 import cv2 as cv
7 import numpy as np
8
9
10 # 制作哪一个dir的数据
11 dir_num = 3
12 image_size = 400
13 depth = 11
14
15
16 train_png_path = "./data_dir_png/train"
17 label_png_path = "./data_dir_png/label"
18 train_64_input_path = "./vnet_" + str(depth) + "_1_input/train"
19 label_64_input_path = "./vnet_" + str(depth) + "_1_input/label"
20 if not os.path.isdir(train_64_input_path):
21 os.makedirs(train_64_input_path)
22 if not os.path.isdir(label_64_input_path):
23 os.makedirs(label_64_input_path)
24
25
26 train_dirs = os.listdir(train_png_path)
27 label_dirs = os.listdir(label_png_path)
28 train_dirs.sort(key=lambda x: int(x))
29 label_dirs.sort(key=lambda x: int(x))
30 # 选择需要制作数据的dir
31 dir_name = train_dirs[dir_num]
32 # train和label的dir地址
33 train_dir_path = os.path.join(train_png_path, dir_name)
34 label_dir_path = os.path.join(label_png_path, dir_name)
35
36 train_pngs = os.listdir(train_dir_path)
37 train_pngs.sort(key=lambda x: int(x.split(".")[0]))
38 label_pngs = os.listdir(label_dir_path)
39 label_pngs.sort(key=lambda x: int(x.split(".")[0]))
40
41 for i in range(len(train_pngs)):
42 train_npy = np.ndarray((depth, image_size, image_size, 1), dtype=np.uint8)
43 label_npy = np.ndarray((image_size, image_size, 1), dtype=np.uint8)
44 if (i + depth-1) len(train_pngs):
45 label_img_path = os.path.join(label_dir_path, label_pngs[i+5])
46 label_img = cv.imread(label_img_path, 0)
47
48 # cv.imshow("label", label_img)
49
50 label_img = np.reshape(label_img, (image_size, image_size, 1))
51 label_npy = label_img
52 for j in range(depth):
53 index = i + j
54 train_img_path = os.path.join(train_dir_path, train_pngs[index])
55 train_img = cv.imread(train_img_path, 0)
56
57 # cv.imshow("train", train_img)
58
59 train_img = np.reshape(train_img, (image_size, image_size, 1))
60 train_npy[j] = train_img
61
62 # cv.waitKey(0)
63 # cv.destroyAllWindows()
64
65 train_input_path = os.path.join(train_64_input_path, str(dir_num))
66 label_input_path = os.path.join(label_64_input_path, str(dir_num))
67 if not os.path.isdir(train_input_path):
68 os.makedirs(train_input_path)
69 if not os.path.isdir(label_input_path):
70 os.makedirs(label_input_path)
71 print(train_npy.shape)
72 print(label_npy.shape)
73 np.save(train_input_path + "/" + str(i) + ".npy", train_npy)
74 np.save(label_input_path + "/" + str(i) + ".npy", label_npy)
然后,进行网络训练
1 import keras
2 from keras.models import *
3 from keras.layers import Input, Conv3D, Deconvolution3D, Dropout, Concatenate, UpSampling3D
4 from keras.optimizers import *
5 from keras import layers
6 from keras import backend as K
7
8 from keras.callbacks import ModelCheckpoint
9 from V_Net.vnet_3_3.fit_generator import get_path_list, get_train_batch
10 import matplotlib.pyplot as plt
11
12 train_batch_size = 1
13 epoch = 1
14 image_size = 512
15 depth = 3
16
17 data_train_path = "./data/train"
18 data_label_path = "./data/label"
19 train_path_list, label_path_list, count = get_path_list(data_train_path, data_label_path)
20
21
22 # 写一个LossHistory类,保存loss和acc
23 class LossHistory(keras.callbacks.Callback):
24 def on_train_begin(self, logs={}):
25 self.losses = {‘batch‘: [], ‘epoch‘: []}
26 self.accuracy = {‘batch‘: [], ‘epoch‘: []}
27 self.val_loss = {‘batch‘: [], ‘epoch‘: []}
28 self.val_acc = {‘batch‘: [], ‘epoch‘: []}
29
30 def on_batch_end(self, batch, logs={}):
31 self.losses[‘batch‘].append(logs.get(‘loss‘))
32 self.accuracy[‘batch‘].append(logs.get(‘dice_coef‘))
33 self.val_loss[‘batch‘].append(logs.get(‘val_loss‘))
34 self.val_acc[‘batch‘].append(logs.get(‘val_acc‘))
35
36 def on_epoch_end(self, batch, logs={}):
37 self.losses[‘epoch‘].append(logs.get(‘loss‘))
38 self.accuracy[‘epoch‘].append(logs.get(‘dice_coef‘))
39 self.val_loss[‘epoch‘].append(logs.get(‘val_loss‘))
40 self.val_acc[‘epoch‘].append(logs.get(‘val_acc‘))
41
42 def loss_plot(self, loss_type):
43 iters = range(len(self.losses[loss_type]))
44 plt.figure()
45 # acc
46 plt.plot(iters, self.accuracy[loss_type], ‘r‘, label=‘train dice‘)
47 # loss
48 plt.plot(iters, self.losses[loss_type], ‘g‘, label=‘train loss‘)
49 if loss_type == ‘epoch‘:
50 # val_acc
51 plt.plot(iters, self.val_acc[loss_type], ‘b‘, label=‘val acc‘)
52 # val_loss
53 plt.plot(iters, self.val_loss[loss_type], ‘k‘, label=‘val loss‘)
54 plt.grid(True)
55 plt.xlabel(loss_type)
56 plt.ylabel(‘dice-loss‘)
57 plt.legend(loc="best")
58 plt.show()
59
60
61 def dice_coef(y_true, y_pred):
62 smooth = 1.
63 y_true_f = K.flatten(y_true)
64 y_pred_f = K.flatten(y_pred)
65 intersection = K.sum(y_true_f * y_pred_f)
66 return (2. * intersection + smooth) / (K.sum(y_true_f * y_true_f) + K.sum(y_pred_f * y_pred_f) + smooth)
67
68
69 def dice_coef_loss(y_true, y_pred):
70 return 1. - dice_coef(y_true, y_pred)
71
72
73 def mycrossentropy(y_true, y_pred, e=0.1):
74 nb_classes = 10
75 loss1 = K.categorical_crossentropy(y_true, y_pred)
76 loss2 = K.categorical_crossentropy(K.ones_like(y_pred) / nb_classes, y_pred)
77 return (1 - e) * loss1 + e * loss2
78
79
80 class myVnet(object):
81 def __init__(self, img_depth=depth, img_rows=image_size, img_cols=image_size, img_channel=1, drop=0.5):
82 self.img_depth = img_depth
83 self.img_rows = img_rows
84 self.img_cols = img_cols
85 self.img_channel = img_channel
86 self.drop = drop
87
88 def BN_operation(self, input):
89 output = keras.layers.normalization.BatchNormalization(axis=-1, momentum=0.99, epsilon=0.001, center=True,
90 scale=True,
91 beta_initializer=‘zeros‘, gamma_initializer=‘ones‘,
92 moving_mean_initializer=‘zeros‘,
93 moving_variance_initializer=‘ones‘,
94 beta_regularizer=None,
95 gamma_regularizer=None, beta_constraint=None,
96 gamma_constraint=None)(input)
97 return output
98
99 def encode_layer(self, kernel_num, kernel_size, input):
100 # 第一次卷积
101 conv1 = Conv3D(kernel_num, kernel_size, activation=‘relu‘, padding=‘same‘,
102 kernel_initializer=‘he_normal‘)(input)
103 conv1 = self.BN_operation(conv1)
104 conv1 = Dropout(self.drop)(conv1)
105 # 第二次卷积
106 conv2 = Conv3D(kernel_num, kernel_size, activation=‘relu‘, padding=‘same‘,
107 kernel_initializer=‘he_normal‘)(conv1)
108 conv2 = self.BN_operation(conv2)
109 conv2 = Dropout(self.drop)(conv2)
110 # 残差
111 res = layers.add([conv1, conv2])
112 return res
113
114 def down_operation(self, kernel_num, kernel_size, input):
115 down = Conv3D(kernel_num, kernel_size, strides=[1, 2, 2], activation=‘relu‘, padding=‘same‘,
116 kernel_initializer=‘he_normal‘)(input)
117 down = self.BN_operation(down)
118 down = Dropout(self.drop)(down)
119 return down
120
121 def decode_layer(self, kernel_num, kernel_size, input, code_layer):
122 # deconv = Deconvolution3D(kernel_num, kernel_size, strides=(1, 2, 2), activation=‘relu‘, padding=‘same‘,
123 # kernel_initializer=‘he_normal‘)(input)
124 deconv = Conv3D(kernel_num, kernel_size, activation=‘relu‘, padding=‘same‘, kernel_initializer=‘he_normal‘)(
125 UpSampling3D(size=(1, 2, 2))(input))
126
127 merge = Concatenate(axis=4)([deconv, code_layer])
128 conv = Conv3D(kernel_num, kernel_size, activation=‘relu‘, padding=‘same‘,
129 kernel_initializer=‘he_normal‘)(merge)
130 conv = self.BN_operation(conv)
131 conv = Dropout(self.drop)(conv)
132
133 res = layers.add([deconv, conv])
134 return res
135
136 # V-Net网络
137 def get_vnet(self):
138 inputs = Input((self.img_depth, self.img_rows, self.img_cols, self.img_channel))
139
140 # 卷积层1
141 conv1 = self.encode_layer(16, [depth, 3, 3], inputs)
142 # 下采样1
143 down1 = self.down_operation(32, [depth, 3, 3], conv1)
144
145 # 卷积层2
146 conv2 = self.encode_layer(32, [depth, 3, 3], down1)
147 # 下采样2
148 down2 = self.down_operation(64, [depth, 3, 3], conv2)
149
150 # 卷积层3
151 conv3 = self.encode_layer(64, [depth, 3, 3], down2)
152 # 下采样3
153 down3 = self.down_operation(128, [depth, 3, 3], conv3)
154
155 # 卷积层4
156 conv4 = self.encode_layer(128, [depth, 3, 3], down3)
157 # 下采样4
158 down4 = self.down_operation(256, [depth, 3, 3], conv4)
159
160 # 卷积层5
161 conv5 = self.encode_layer(256, [depth, 3, 3], down4)
162
163 # 反卷积6
164 deconv6 = self.decode_layer(128, [depth, 3, 3], conv5, conv4)
165
166 # 反卷积7
167 deconv7 = self.decode_layer(64, [depth, 3, 3], deconv6, conv3)
168
169 # 反卷积8
170 deconv8 = self.decode_layer(32, [depth, 3, 3], deconv7, conv2)
171
172 # 反卷积9
173 deconv9 = self.decode_layer(16, [depth, 3, 3], deconv8, conv1)
174 conv9 = Conv3D(8, [depth, 3, 3], activation=‘relu‘, padding=‘same‘,
175 kernel_initializer=‘he_normal‘)(deconv9)
176 conv9 = Conv3D(4, [depth, 3, 3], activation=‘relu‘, padding=‘same‘,
177 kernel_initializer=‘he_normal‘)(conv9)
178 conv9 = Conv3D(2, [depth, 3, 3], activation=‘relu‘, padding=‘same‘,
179 kernel_initializer=‘he_normal‘)(conv9)
180
181 conv10 = Conv3D(1, [1, 1, 1], activation=‘sigmoid‘)(conv9)
182
183 model = Model(inputs=inputs, outputs=conv10)
184
185 # 在这里可以自定义损失函数loss和准确率函数accuracy
186 # model.compile(optimizer=Adam(lr=1e-4), loss=‘binary_crossentropy‘, metrics=[‘accuracy‘])
187 model.compile(optimizer=Adam(lr=1e-4), loss=‘binary_crossentropy‘, metrics=[‘accuracy‘,
188 dice_coef])
189 print(‘model compile‘)
190 return model
191
192 def train(self):
193 print("loading data")
194 print("loading data done")
195
196 model = self.get_vnet()
197 print("got vnet")
198
199 # 保存的是模型和权重
200 model_checkpoint = ModelCheckpoint(‘../model/vnet_liver.hdf5‘, monitor=‘loss‘,
201 verbose=1, save_best_only=True)
202 print(‘Fitting model...‘)
203
204 # 创建一个实例history
205 history = LossHistory()
206 # 在callbacks中加入history最后才能绘制收敛曲线
207 model.fit_generator(
208 generator=get_train_batch(train_path_list, label_path_list, train_batch_size, depth, image_size, image_size),
209 epochs=epoch, verbose=1,
210 steps_per_epoch=count//train_batch_size,
211 callbacks=[model_checkpoint, history],
212 workers=1)
213 # 绘制acc-loss曲线
214 history.loss_plot(‘batch‘)
215 plt.savefig(‘vnet_liver_dice_loss_curve.png‘)
216
217
218 if __name__ == ‘__main__‘:
219 myvnet = myVnet()
220 myvnet.train()
导入数据程序
1 import numpy as np
2 import cv2 as cv
3 import os
4
5 data_train_path = "../../Vnet_tf/V_Net_data/train"
6 data_label_path = "../../Vnet_tf/V_Net_data/label"
7
8
9 def get_path_list(data_train_path, data_label_path):
10 dirs = os.listdir(data_train_path)
11 dirs.sort(key=lambda x: int(x))
12 count = 0
13 for dir in dirs:
14 dir_path = os.path.join(data_train_path, dir)
15 count += len(os.listdir(dir_path))
16 print("共有{}组训练数据".format(count))
17
18 train_path_list = []
19 label_path_list = []
20 for dir in dirs:
21 train_dir_path = os.path.join(data_train_path, dir)
22 label_dir_path = os.path.join(data_label_path, dir)
23 trains = os.listdir(train_dir_path)
24 labels = os.listdir(label_dir_path)
25 trains.sort(key=lambda x: int(x.split(".")[0]))
26 labels.sort(key=lambda x: int(x.split(".")[0]))
27 for name in trains:
28 train_path = os.path.join(train_dir_path, name)
29 label_path = os.path.join(label_dir_path, name)
30
31 train_path_list.append(train_path)
32 label_path_list.append(label_path)
33
34 return train_path_list, label_path_list, count
35
36
37 def get_train_img(paths, img_d, img_rows, img_cols):
38 """
39 参数:
40 paths:要读取的图片路径列表
41 img_rows:图片行
42 img_cols:图片列
43 color_type:图片颜色通道
44 返回:
45 imgs: 图片数组
46 """
47 # Load as grayscale
48 datas = []
49 for path in paths:
50 data = np.load(path)
51 # Reduce size
52 resized = np.reshape(data, (img_d, img_rows, img_cols, 1))
53 resized = resized.astype(‘float32‘)
54 resized /= 255
55 mean = resized.mean(axis=0)
56 resized -= mean
57 datas.append(resized)
58 datas = np.array(datas)
59 return datas
60
61
62 def get_label_img(paths, img_d, img_rows, img_cols):
63 """
64 参数:
65 paths:要读取的图片路径列表
66 img_rows:图片行
67 img_cols:图片列
68 color_type:图片颜色通道
69 返回:
70 imgs: 图片数组
71 """
72 # Load as grayscale
73 datas = []
74 for path in paths:
75 data = np.load(path)
76 # Reduce size
77 resized = np.reshape(data, (img_d, img_cols, img_rows, 1))
78 resized = resized.astype(‘float32‘)
79 resized /= 255
80 datas.append(resized)
81 datas = np.array(datas)
82 return datas
83
84
85 def get_train_batch(train, label, batch_size, img_d, img_w, img_h):
86 """
87 参数:
88 X_train:所有图片路径列表
89 y_train: 所有图片对应的标签列表
90 batch_size:批次
91 img_w:图片宽
92 img_h:图片高
93 color_type:图片类型
94 is_argumentation:是否需要数据增强
95 返回:
96 一个generator,x: 获取的批次图片 y: 获取的图片对应的标签
97 """
98 while 1:
99 for i in range(0, len(train), batch_size):
100 x = get_train_img(train[i:i+batch_size], img_d, img_w, img_h)
101 y = get_label_img(label[i:i+batch_size], img_d, img_w, img_h)
102 # 最重要的就是这个yield,它代表返回,返回以后循环还是会继续,然后再返回。就比如有一个机器一直在作累加运算,但是会把每次累加中间结果告诉你一样,直到把所有数加完
103 yield(np.array(x), np.array(y))
104
105
106 if __name__ == "__main__":
107 train_path_list, label_path_list, count = get_path_list(data_train_path, data_label_path)
108 print(train_path_list)
最后,测试模型
使用训练集生成程序来生成测试集;测试网络;评估模型
上一篇:CSS6:flex布局
下一篇:Exp9 Web安全基础