在 CUDA C/C++ kernel中使用内存
2021-03-12 00:28
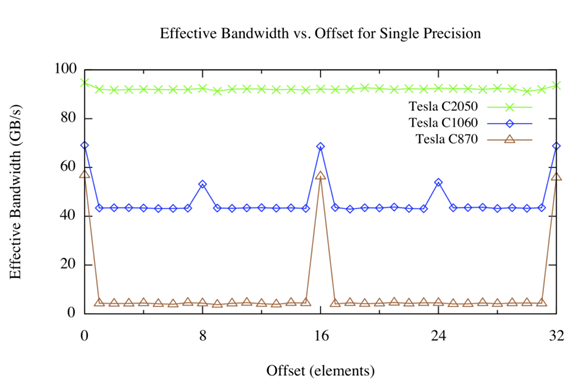
标签:共享内存 rcm thread 传输 命令行 array ble hub 基本 在 CUDA C/C++ kernel中使用内存 如何在主机和设备之间高效地移动数据。本文将讨论如何有效地从内核中访问设备存储器,特别是 全局内存 。 在 CUDA 设备上有几种内存,每种内存的作用域、生存期和缓存行为都不同。到目前为止,已经使用了驻留在设备 DRAM 中的 全局内存 ,用于主机和设备之间的传输,以及内核的数据输入和输出。这里的名称 global 是指作用域,因为它可以从主机和设备访问和修改。全局内存可以像下面代码片段的第一行那样使用 在讨论全局内存访问性能之前,需要改进对 CUDA 执行模型的理解。已经讨论了如何将 线程被分组为线程块 分配给设备上的多处理器。在执行过程中,有一个更精细的线程分组到 warps 。 GPU 上的多处理器以 SIMD ( 单指令多数据 )方式为每个扭曲执行指令。所有当前支持 CUDA – 的 GPUs 的翘曲尺寸(实际上是 SIMD 宽度)是 32 个线程。 将线程分组为扭曲不仅与计算有关,而且与全局内存访问有关。设备 coalesces 全局内存加载并存储,由一个 warp 线程发出的尽可能少的事务,以最小化 DRAM 带宽(在计算能力小于 2 . 0 的老硬件上,事务合并在 16 个线程的一半扭曲内,而不是整个扭曲中)。为了弄清楚 CUDA 设备架构中发生聚结的条件,在三个 Tesla 卡上进行了一些简单的实验: a Tesla C870 (计算能力 1 . 0 )、 Tesla C1060 (计算能力 1 . 3 )和 Tesla C2050 (计算能力 2 . 0 )。 运行两个实验,使用如下代码( GitHub 上也有 )中所示的增量内核的变体,一个具有数组偏移量,这可能导致对输入数组的未对齐访问,另一个是对输入数组的跨步访问。 此代码可以通过传递“ fp64 ”命令行选项以单精度(默认值)或双精度运行偏移量内核和跨步内核。每个内核接受两个参数,一个输入数组和一个表示访问数组元素的偏移量或步长的整数。内核在一系列偏移和跨距的循环中被称为。 下图显示了 Tesla C870 、 C1060 和 C2050 上的偏移内核的结果。 设备内存中分配的数组由 CUDA 驱动程序与 256 字节内存段对齐。该设备可以通过 32 字节、 64 字节或 128 字节的事务来访问全局内存。对于 C870 或计算能力为 1 . 0 的任何其他设备,半线程的任何未对齐访问(或半扭曲线程不按顺序访问内存的对齐访问)将导致 16 个独立的 32 字节事务。由于每个 32 字节事务只请求 4 个字节,因此可以预期有效带宽将减少 8 倍,这与上图(棕色线)中看到的偏移量(不是 16 个元素的倍数)大致相同,对应于线程的一半扭曲。 对于计算能力为 1 . 2 或 1 . 3 的 Tesla C1060 或其他设备,未对准访问的问题较少。基本上,通过半个线程对连续数据的未对齐访问在几个“覆盖”请求的数据的事务中提供服务。由于未请求的数据正在传输,以及不同的半翘曲所请求的数据有些重叠,因此相对于对齐的情况仍然存在性能损失,但是这种损失远远小于 C870 。 计算能力为 2 . 0 的设备,如 Tesla C250 ,在每个多处理器中都有一个 L1 缓存,其行大小为 128 字节。该设备将线程的访问合并到尽可能少的缓存线中,从而导致对齐,对跨线程顺序内存访问吞吐量的影响可以忽略不计。 步幅内核的结果如下图所示。 对于快速的全局内存访问,有不同的看法。对于大步进,无论架构版本如何,有效带宽都很差。这并不奇怪:当并发线程同时访问物理内存中相距很远的内存地址时,硬件就没有机会合并这些访问。从上图中可以看出,在 Tesla C870 上,除 1 以外的任何步幅都会导致有效带宽大幅降低。这是因为 compute capability 1 . 0 和 1 . 1 硬件需要跨线程进行线性、对齐的访问以进行合并,因此我们在 offset 内核中看到了熟悉的 1 / 8 带宽。 Compute capability 1 . 2 及更高版本的硬件可以将访问合并为对齐的段( CC 1 . 2 / 1 . 3 上为 32 、 64 或 128 字节段,在 CC 2 . 0 及更高版本上为 128 字节缓存线),因此该硬件可以产生平滑的带宽曲线。 当访问多维数组时,线程通常需要索引数组的更高维,因此快速访问是不可避免的。可以使用一种名为 共享内存 的 CUDA 内存来处理这些情况。共享内存是一个线程块中所有线程共享的片上内存。共享内存的一个用途是将多维数组的 2D 块以合并的方式从全局内存提取到共享内存中,然后让连续的线程绕过共享内存块。与全局内存不同,对共享内存的快速访问没有惩罚。 本文讨论了如何从 CUDA 内核代码中有效地访问全局内存的一些方面。设备上的全局内存访问与主机上的数据访问具有相同的性能特征,即数据局部性非常重要。在早期的 CUDA 硬件中,内存访问对齐和跨线程的局部性一样重要,但在最近的硬件上,对齐并不是什么大问题。另一方面,快速的内存访问会损害性能,使用片上共享内存可以减轻这种影响。 在 CUDA C/C++ kernel中使用内存 标签:共享内存 rcm thread 传输 命令行 array ble hub 基本 原文地址:https://www.cnblogs.com/wujianming-110117/p/14091919.html__device__ de Clara 说明符在全局(变量)范围内声明,或者使用 cudaMalloc() 动态分配并分配给一个常规的 C 指针变量,如第 7 行所示。全局内存分配可以在应用程序的生命周期内保持。根据设备的 计算能力 ,全局内存可能被缓存在芯片上,也可能不在芯片上缓存。__device__ int globalArray[256];
void foo()
{
...
int *myDeviceMemory = 0;
cudaError_t result = cudaMalloc(&myDeviceMemory, 256 * sizeof(int));
...
}
全局内存合并
#include
#include
// Convenience function for checking CUDA runtime API results
// can be wrapped around any runtime API call. No-op in release builds.
inline
cudaError_t checkCuda(cudaError_t result)
{
#if defined(DEBUG) || defined(_DEBUG)
if (result != cudaSuccess) {
fprintf(stderr, "CUDA Runtime Error: %sn", cudaGetErrorString(result));
assert(result == cudaSuccess);
}
#endif
return result;
}
template
__global__ void offset(T* a, int s)
{
int i = blockDim.x * blockIdx.x + threadIdx.x + s;
a[i] = a[i] + 1;
}
template
__global__ void stride(T* a, int s)
{
int i = (blockDim.x * blockIdx.x + threadIdx.x) * s;
a[i] = a[i] + 1;
}
template
void runTest(int deviceId, int nMB)
{
int blockSize = 256;
float ms;
T *d_a;
cudaEvent_t startEvent, stopEvent;
int n = nMB*1024*1024/sizeof(T);
// NB: d_a(33*nMB) for stride case
checkCuda( cudaMalloc(&d_a, n * 33 * sizeof(T)) );
checkCuda( cudaEventCreate(&startEvent) );
checkCuda( cudaEventCreate(&stopEvent) );
printf("Offset, Bandwidth (GB/s):n");
offset>(d_a, 0); // warm up
for (int i = 0; i
checkCuda( cudaMemset(d_a, 0.0, n * sizeof(T)) );
checkCuda( cudaEventRecord(startEvent,0) );
offset>(d_a, i);
checkCuda( cudaEventRecord(stopEvent,0) );
checkCuda( cudaEventSynchronize(stopEvent) );
checkCuda( cudaEventElapsedTime(&ms, startEvent, stopEvent) );
printf("%d, %fn", i, 2*nMB/ms);
}
printf("n");
printf("Stride, Bandwidth (GB/s):n");
stride>(d_a, 1); // warm up
for (int i = 1; i
checkCuda( cudaMemset(d_a, 0.0, n * sizeof(T)) );
checkCuda( cudaEventRecord(startEvent,0) );
stride>(d_a, i);
checkCuda( cudaEventRecord(stopEvent,0) );
checkCuda( cudaEventSynchronize(stopEvent) );
checkCuda( cudaEventElapsedTime(&ms, startEvent, stopEvent) );
printf("%d, %fn", i, 2*nMB/ms);
}
checkCuda( cudaEventDestroy(startEvent) );
checkCuda( cudaEventDestroy(stopEvent) );
cudaFree(d_a);
}
int main(int argc, char **argv)
{
int nMB = 4;
int deviceId = 0;
bool bFp64 = false;
for (int i = 1; i
if (!strncmp(argv[i], "dev=", 4))
deviceId = atoi((char*)(&argv[i][4]));
else if (!strcmp(argv[i], "fp64"))
bFp64 = true;
}
cudaDeviceProp prop;
checkCuda( cudaSetDevice(deviceId) )
;
checkCuda( cudaGetDeviceProperties(&prop, deviceId) );
printf("Device: %sn", prop.name);
printf("Transfer size (MB): %dn", nMB);
printf("%s Precisionn", bFp64 ? "Double" : "Single");
if (bFp64) runTest(deviceId, nMB);
else runTest(deviceId, nMB);
}
未对齐的数据访问
快速内存访问

概括
文章标题:在 CUDA C/C++ kernel中使用内存
文章链接:http://soscw.com/index.php/essay/63432.html