用python给女朋友照片加上个性相框,学会等着她夸你!
2021-03-30 15:27
标签:堆叠 source tween array ipv6 float byte sha turn 讲解下如何给女朋友照片加上个性相框,学会让她夸你。 素材1 你的女朋友图 代码 效果展示 得到的图 哈哈哈哈 非常简单 有没有 获取源代码打包工具加群哈:1136192749 用python给女朋友照片加上个性相框,学会等着她夸你! 标签:堆叠 source tween array ipv6 float byte sha turn 原文地址:https://www.cnblogs.com/A3535/p/13582026.html
。
相框

import cv2
import numpy as np
def get_four_points(im):
data = {}
data[‘im‘] = im.copy()
data[‘points‘] = []
cv2.namedWindow("Image", 0)
cv2.imshow(‘Image‘,im)
#请注意你标记点的数据,是顺时针,需要与pst_src 方向一致
cv2.setMouseCallback("Image",mouse_handler,data)
cv2.waitKey(0)
#竖直方向堆叠起来;
points = np.vstack(data[‘points‘]).astype(float)
return points
#---第4步:主函数---
def main():
#美女照片读取,注意路径
img_src = cv2.imread("meinv.jpg")
size = img_src.shape
# 取得四个坐标
##需要注意一点,坐标 Pick 点的顺序须与记录替换图像顶点顺序一致,否则转换图会有偏差
pst_src = np.array(
[
[0,0],[size[1]-1,0],
[size[1]-1,size[0]-1],
[0,size[0]-1]
],dtype=float
)
#大图:相框,注意路径
img_dst = cv2.imread("xiangkuang.jpg")
print("点击bllboard的四个角,然后回车")#获取四个点
four_point = get_four_points(img_dst)
#Calculate Homography between source and destination points
#计算源点和目标点之间的单应性
h,status = cv2.findHomography(pst_src,four_point)
#透视变换(单应性)
im_temp = cv2.warpPerspective(img_src,h,(img_dst.shape[1],img_dst.shape[0]))
cv2.fillConvexPoly(img_dst,four_point.astype(int),0,16)
#照片叠加
img_dst = img_dst + im_temp
cv2.namedWindow("Image", 0)
cv2.imshow("Image",img_dst)
cv2.imwrite(‘Image.png‘,img_dst)#照片保存
cv2.waitKey(0)
#---第5步:调用main函数---
if __name__ ==‘__main__‘:
main()
描绘啦四个点后,点击enter 就可以啦
当然也可以随意描点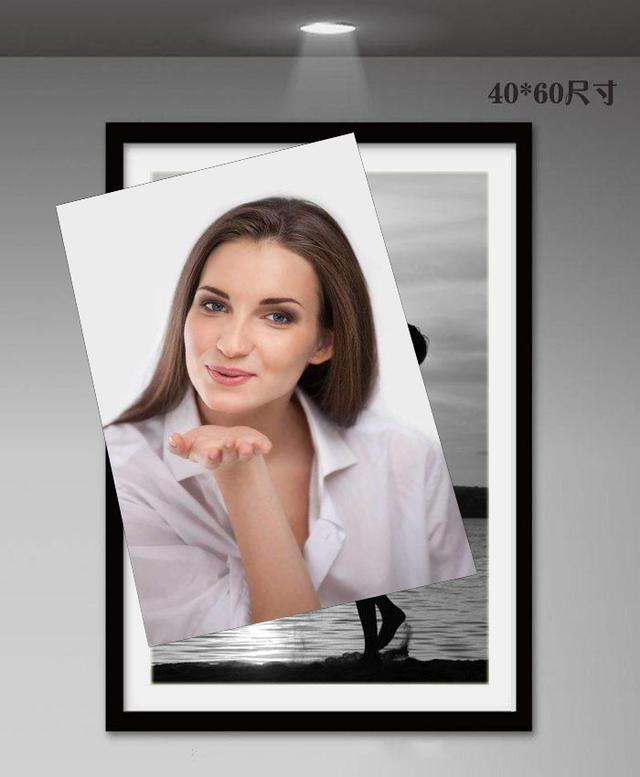
文章标题:用python给女朋友照片加上个性相框,学会等着她夸你!
文章链接:http://soscw.com/index.php/essay/70048.html