教程翻译-理解基于矢量场寻路算法
2021-05-01 13:29
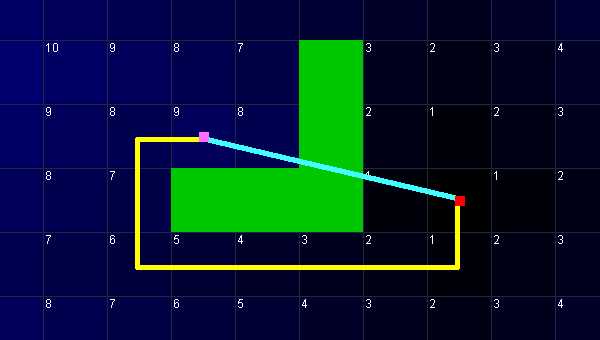
标签:grid 效果 方法 对比 inf algo 热力图 out front 这个教程中我会解释向量场寻路(vector field pathfinding)以及它对比其他传统的寻路的优点,比如Dijkstra‘s算法。对于 Dijkstra‘s算法和势场(potential fields)概念的理解可以帮助你更好的理解本文,但这不是必要条件。 寻路问题有多种方案,每种方案都有其优缺点。很多寻路算法为每一个寻路个体执行路径计算,这就意味着寻路开销会随着寻路个体成倍增加而增加。在很多情况下是可以接受的,但如果有几百个寻路个体的情况下,需要有更高效的方法。 向量场寻路方法计算从寻路的终点到图中的每一个节点的路径。为了更充分地对向量场寻路的解释,我会用我个人的实现版本作为例子。 注:向量场通常可以用节点或者图;这里我使用tile和grid并不意味这这个算法仅限于基于tile的世界! 向量场算法由三个步骤组成。 这个视频展示了最终的效果,为你展示完整教程的总体概念: 热力图保存了从终点到地图上每一个点的寻路距离。寻路距离区别于欧式距离,它计算了2点之间能通过的地形的距离。这就好比是GPS总是只计算地图上能通过的道路的路径距离。 下图中你可以看出从终点(这里标记为红色)到任意一点(标记为粉色)的路径距离和直线距离的区别。不可通过的tile被染成绿色。你可以看到,路径距离(黄色)是9,直线距离(浅蓝)大约是4.12。 通过热力图生成算法,每一个Tile的左上角的数字显示了到达终点的路径距离。请注意2点之间有多条路径;本文中我们只关心最短路径。 热力图生成算法是一种波面算法(wavefront algorithm)。算法从终点开始,标记值为0,最后像波浪一样扩散,填满整个可以通过的区域。波面算法包含2个步骤: 注:波面算法是在grid上使用广度优先算法,并保存从终点到每个tile的路径需要花费多少步。这个算法有时也被称为森林火灾算法。 既然每个tile到达终点的路径长度已经计算完毕了,我们可以很简单的确定如何接近终点的路径。 教程翻译-理解基于矢量场寻路算法 标签:grid 效果 方法 对比 inf algo 热力图 out front 原文地址:https://www.cnblogs.com/terrynoya/p/13206962.html简介
视频预览
1.生成热力图,用来确定地图中任意块/节点到终点的路径距离
2.为每一个节点生成指向到达终点方向的矢量域
3.每个正在搜索共享终点的粒子使用矢量域导航到终点
https://youtu.be/Bspb9g9nTto生成热力图
1.算法从终点开始,用0标记终点的路径长度。
2.标记每一个未被标记的相邻tile,赋值为前一个路径长度 + 1
3.继续算法之道地图中每一个可达的tile都被标记完成生成矢量场