ROS kinetic语音识别
2021-05-18 01:28
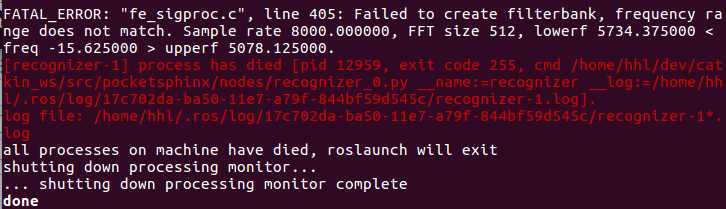
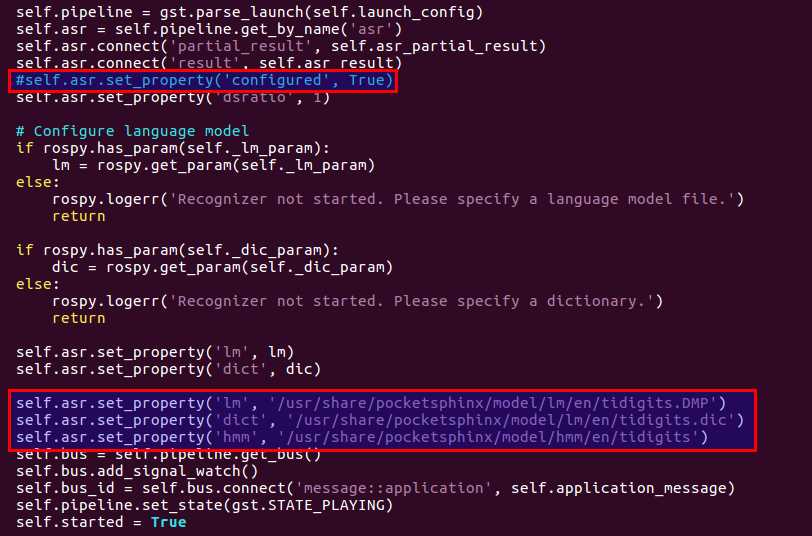
标签:jessie arp 参考 终端 dmp style comm property 通话 1.安装依赖 1.1安装ros-kinetic-audio-common 1.2 安装libasound2 1.3 安装libgstreamer0.10 1.4安装python-gst0.10 2.安装 libsphinxbase1 下载地址:https://packages.debian.org/jessie/libsphinxbase1 3. 安装libpocketsphinx1 下载地址:https://packages.debian.org/jessie/libpocketsphinx1 4.安装gstreamer0.10-pocketsphinx 下载地址:https://packages.debian.org/jessie/gstreamer0.10-pocketsphinx 5.安装pocketsphinx 5.1进入工作空间,git源码 5.2下载英文语音包pocketsphinx-hmm-en-tidigits (0.8-5) 下载的网站:https://packages.debian.org/jessie/pocketsphinx-hmm-en-tidigits 会加压安装到/usr/share/目录如下所示 在包pocketsphinx下面建一个model目录,存放语音模型文件 将下载好的语音文件,解压后,将其中的model文件下的所有文件拷贝到~/dev/catkin_ws/src/pocketsphinx/model下,也可以不复制。 6 启动pocketsphinx测试 直接运行pocketsphinx启动脚本命令“roslaunch pocketsphinx robocup.launch”会出现如下错误, 为此,首先我对recognizer.py的做了如下修改: 1)注释掉self.asr.set_property(‘configured‘, True) 2)添加lm,dict,hmm支持英语识别(如果是其他语言(如普通话)可以改为别的路径) 这些安装好之后,可以开始测试pocketsphinx的语音识别功能了: 1.终端运行launch启动文件: 2.尝试说一些简单的语句,(如果使用英文库,说一些数字;如果使用普通话库讲中文),查看识别结果 3.用rostopic echo进行查看识别的输出,即ROS发布的结果消息) 7.也可以下载其他包进行测试 中文普通话 pocketsphinx-hmm-zh-tdt https://packages.debian.org/jessie/pocketsphinx-hmm-zh-tdt pocketsphinx-lm-zh-hans-gigatdt https://packages.debian.org/jessie/pocketsphinx-lm-zh-hans-gigatdt 后期考虑在launch文件中设置参数,在recognizer.py加载参数的读取 参考:http://blog.csdn.net/x_r_su/article/details/53022746?locationNum=1&fps=1 http://www.ncnynl.com/archives/201701/1220.html ROS kinetic语音识别 标签:jessie arp 参考 终端 dmp style comm property 通话 原文地址:http://www.cnblogs.com/TooyLee/p/7739783.htmlsudo apt-get install ros-kinetic-audio-common
sudo apt-get install libasound2
sudo apt-get install gstreamer0.10-*
sudo apt-get install python-gst0.10
sudo dpkg -i libsphinxbase1_0.8-6_amd64.deb
sudo dpkg -i libpocketsphinx1_0.8-5_amd64.deb
sudo dpkg -i gstreamer0.10-pocketsphinx_0.8-5_amd64.deb
cd ~/dev/catkin_ws/src
git clone https://github.com/mikeferguson/pocketsphinxsudo dpkg -i pocketsphinx-hmm-en-tidigits_0.8-5_all.deb
/usr/share/doc/pocketsphinx-hmm-en-tidigits/changelog.Debian.gz
/usr/share/doc/pocketsphinx-hmm-en-tidigits/changelog.gz
/usr/share/doc/pocketsphinx-hmm-en-tidigits/copyright
/usr/share/pocketsphinx/model/hmm/en/tidigits/feat.params
/usr/share/pocketsphinx/model/hmm/en/tidigits/mdef
/usr/share/pocketsphinx/model/hmm/en/tidigits/means
/usr/share/pocketsphinx/model/hmm/en/tidigits/sendump
/usr/share/pocketsphinx/model/hmm/en/tidigits/transition_matrices
/usr/share/pocketsphinx/model/hmm/en/tidigits/variances
/usr/share/pocketsphinx/model/lm/en/tidigits.DMP
/usr/share/pocketsphinx/model/lm/en/tidigits.dic
/usr/share/pocketsphinx/model/lm/en/tidigits.fsg
cd ~/dev/catkin_ws/src/pocketsphinx
mkdir model
self.asr.set_property(‘lm‘, ‘/usr/share/pocketsphinx/model/lm/en/tidigits.DMP‘)
self.asr.set_property(‘dict‘, ‘/usr/share/pocketsphinx/model/lm/en/tidigits.dic‘)
self.asr.set_property(‘hmm‘, ‘/usr/share/pocketsphinx/model/hmm/en/tidigits‘)
roslaunch pocketsphinx robocup.launch
rostopic echo /recognizer/output
上一篇:JSON对象