win10 Kinect2 Visualstudio2015 opencv3环境搭建
2021-07-12 06:07
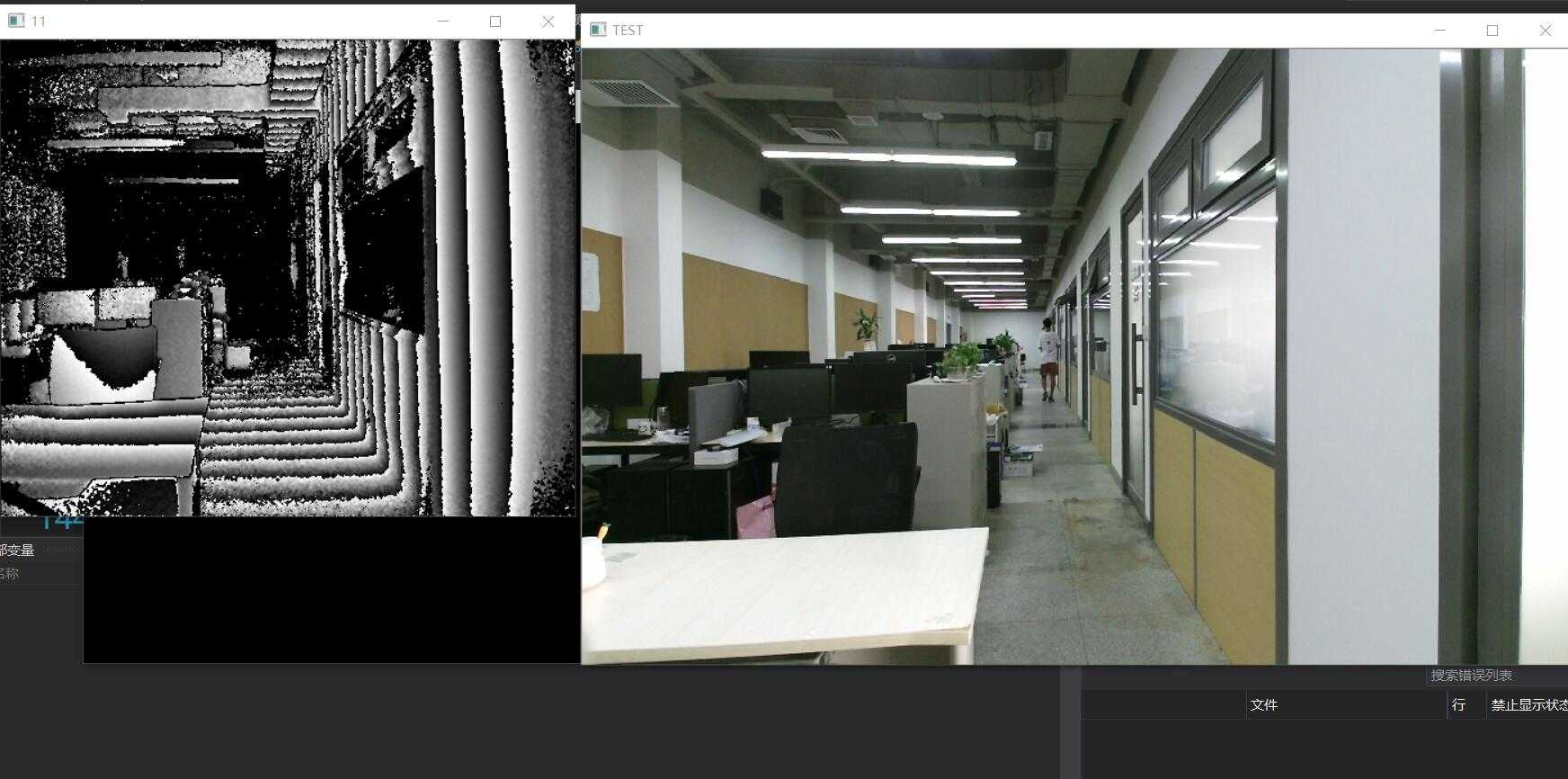
标签:项目 .cpp ott load sse play image name down 1、下载kinect SDK ( ): https://www.microsoft.com/en-us/download/details.aspx?id=44561 下载以后直接安装,注意,必须是win8或者win10系统,由于是微软的产品,所以SDK安装过程非常简单,点击下一步就行,安装完成以后在:C:\Program Files\Microsoft SDKs 目录下 2、安装Visual Studio2015 3、安装Opencv3 4、新建项目KinectTest,在源文件创建test.cpp文件,然后配置 设置为 Debug模式 x64 4.1 配置包含目录 打开包含目录配置窗口,分别配置Kinect和opencv C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\inc (默认) 4.2 配置库目录 C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\Lib\x64 (默认) 4.3 配置连接器 属性页 -> 链接器 -> 输入->附加依赖项 输入: opencv_world300.lib 参考代码:https://blog.csdn.net/ktigerhero3/article/details/49934745 ===============================================代码 #include using namespace cv; UINT nBufferSize = 0; HRESULT hr = GetDefaultKinectSensor(&m_pKinectSensor);//获取默认传感器 Mat colorImg(nHeight, nWidth, CV_8UC4);//新建一个mat对象,用于保存读入的图像,注意参数的高在前,宽在后 /*调用CopyConvertedFrameDataToArray,此函数的作用是从pColorFrame对象中拷贝nBufferSize个字节到pBuffer所指的Mat矩阵中,按 namedWindow("display"); ============================================== 或者在 C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\Samples 下面找一份项目,启动项目 win10 Kinect2 Visualstudio2015 opencv3环境搭建 标签:项目 .cpp ott load sse play image name down 原文地址:https://www.cnblogs.com/herd/p/9613276.htmlKinect for Windows SDK 2.0
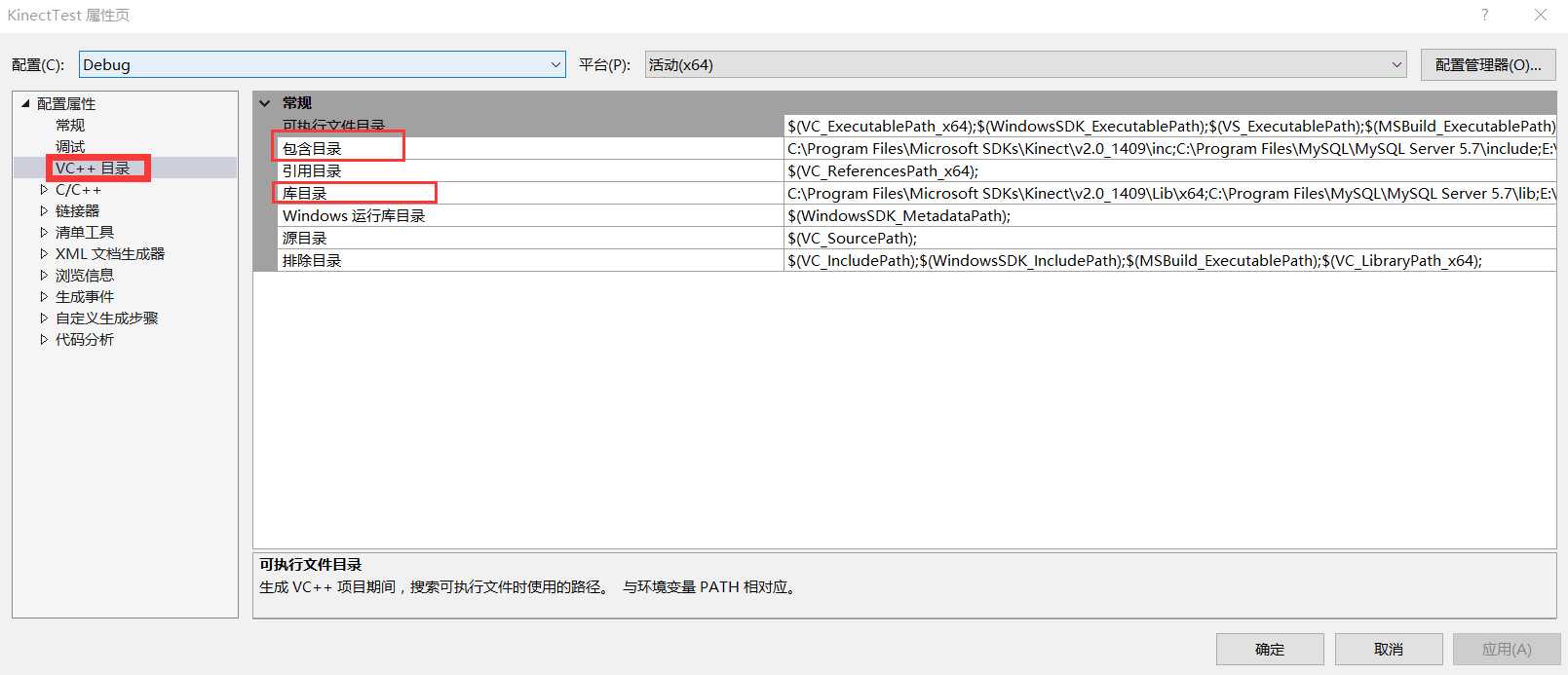
E:\Opencv\opencv3_2_1\opencv\mybuild\install\include (自己opencv的目录)
E:\Opencv\opencv3_2_1\opencv\mybuild\install\include\opencv (自己opencv的目录)
E:\Opencv\opencv3_2_1\opencv\mybuild\install\include\opencv2 (自己opencv的目录)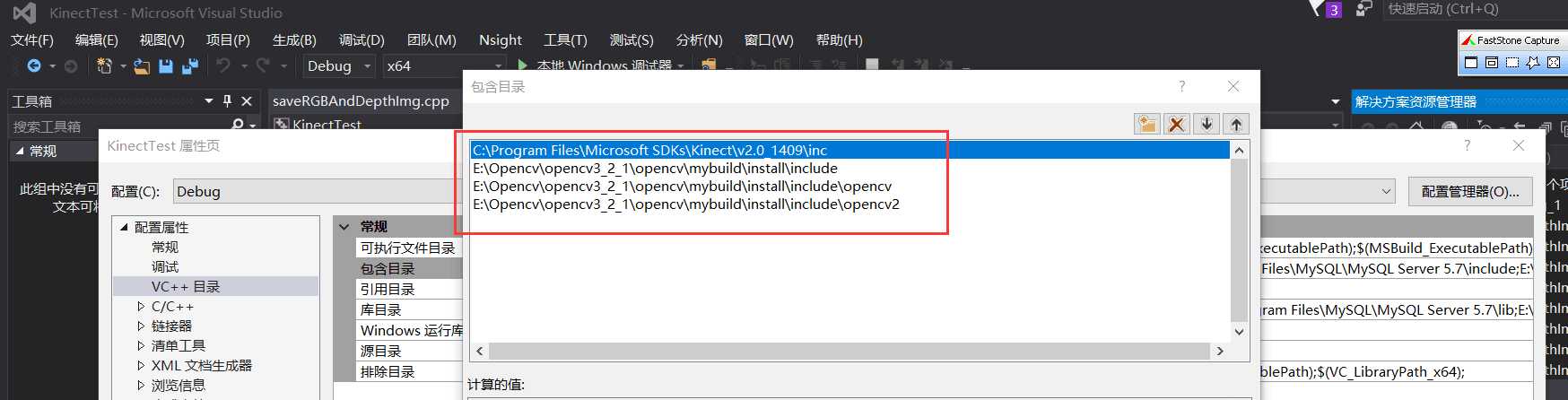
E:\Opencv\opencv3_2_1\opencv\mybuild\install\x64\vc14\lib (自己opencv的目录)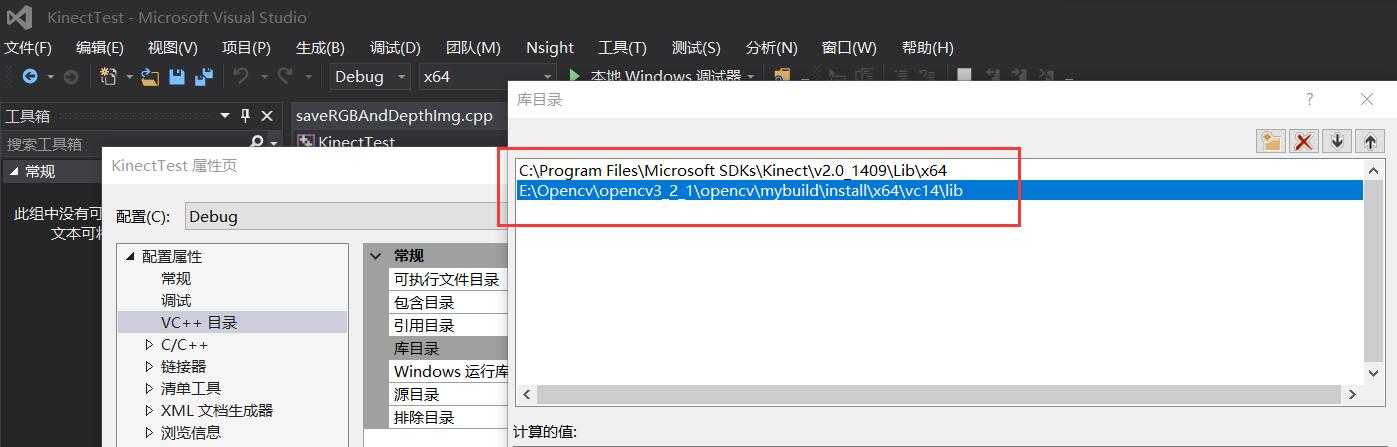

Kinect20.lib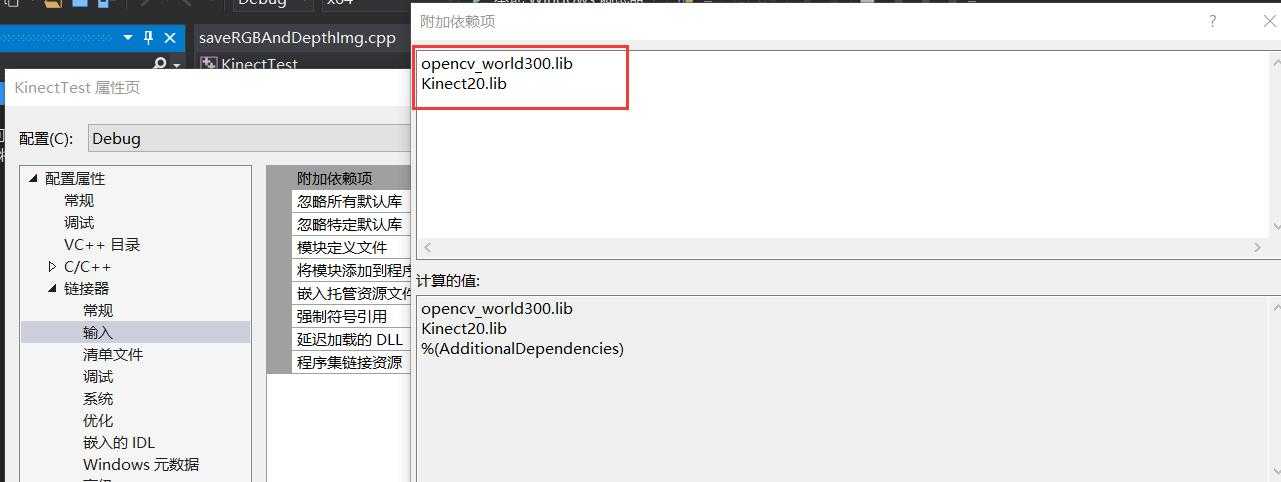
#include
#include
#include
#include
#include
using namespace std;
int main()
{
IKinectSensor* m_pKinectSensor;
IColorFrameSource* pColorFrameSource;
IColorFrameReader* m_pColorFrameReader;
IFrameDescription* pFrameDescription = NULL;
ColorImageFormat imageFormat = ColorImageFormat_None;
int nWidth, nHeight;
uchar *pBuffer = NULL;
assert(hr >= 0);
hr = m_pKinectSensor->Open();//打开传感器
assert(hr >= 0);
hr = m_pKinectSensor->get_ColorFrameSource(&pColorFrameSource);//打开颜色信息源
assert(hr >= 0);
pColorFrameSource->OpenReader(&m_pColorFrameReader);//打开颜色帧读取器
assert(hr >= 0);
while (1){
//获取最近的彩色帧
IColorFrame* pColorFrame = NULL;
while ((hr {
hr = m_pColorFrameReader->AcquireLatestFrame(&pColorFrame);
}
//获取彩色图片信息包括宽,高,格式
assert(hr >= 0);
pColorFrame->get_FrameDescription(&pFrameDescription);//获取图片描述信息
pFrameDescription->get_Width(&nWidth);
pFrameDescription->get_Height(&nHeight);
cout cout pColorFrame->get_RawColorImageFormat(&imageFormat);//输出结果为 ColorImageFormat_Yuy2 = 5,为Yuy2格式
/*YUY2格式,以4:2:2方式打包 YUV 4:2:2
每个色差信道的抽样率是亮度信道的一半,所以水平方向的色度抽样率只是4:4 : 4的一半。对非压缩的8比特量化的图像来说,
每个由两个水平方向相邻的像素组成的宏像素需要占用4字节内存。
下面的四个像素为:[Y0 U0 V0][Y1 U1 V1][Y2 U2 V2][Y3 U3 V3]
存放的码流为:Y0 U0 Y1 V1 Y2 U2 Y3 V3
映射出像素点为:[Y0 U0 V1][Y1 U0 V1][Y2 U2 V3][Y3 U2 V3]*/
cout
pBuffer = colorImg.data;
nBufferSize = colorImg.rows*colorImg.step;
ColorImageFormat_Bgra格式保存*/
hr = pColorFrame->CopyConvertedFrameDataToArray(nBufferSize, reinterpret_cast
pColorFrame->Release();
imshow("display", colorImg);
if (27 == waitKey(50))
break;
}
return 0;
}
上一篇:windows篇
文章标题:win10 Kinect2 Visualstudio2015 opencv3环境搭建
文章链接:http://soscw.com/essay/104036.html