c语言数字图像处理(五):空间滤波
2021-05-18 12:30
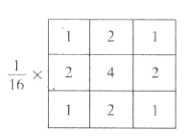
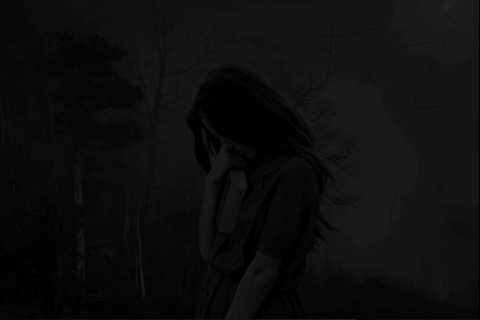
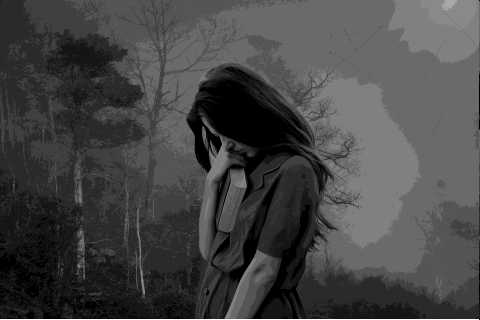
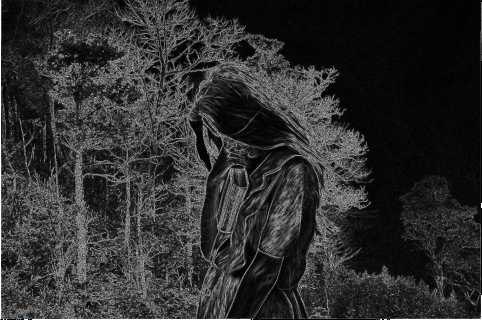
标签:for 图像 sha value ble 效果 text lock sum 使用大小为m*n的滤波器对大小为M*N的图像进行线性空间滤波,将滤波器模板乘以图像中对应灰度值,相加得模板中心灰度值 a = (m-1)/2, b = (n-1)/2 若f(x+s, y+t)不在原图内,补0 滤波过程 分母为滤波器模板和 代码实现 原图 模板 结果 可以看出线性滤波器会较大程度地影响原图,降低对比度,对与图片右上角的噪声没有明显的去除效果 中值滤波器对处理脉冲噪声非常有效,这种噪声被称为椒盐噪声 实现方法:取该像素某邻域中值(本次测试取3*3) 代码实现 一阶微分 二阶微分 二阶微分在增强细节方面比一阶微分好很多,适合锐化图像 代码实现 原图 锐化 实现边缘增强 算法实现 原图 边缘图 边缘图与原图相加可得边缘增强后的图 c语言数字图像处理(五):空间滤波 标签:for 图像 sha value ble 效果 text lock sum 原文地址:https://www.cnblogs.com/GoldBeetle/p/9744625.html 空间滤波原理
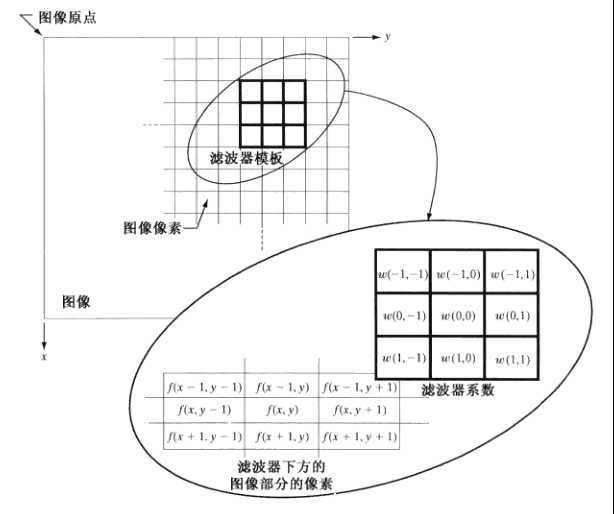

平滑线性滤波器

1 int is_in_array(short x, short y, short height, short width)
2 {
3 if (x >= 0 && x = 0 && y height)
4 return 1;
5 else
6 return 0;
7 }
8
9 /*
10 * element
11 * v0 v1 v2
12 * v3 v4 v5
13 * v6 v7 v8
14 *
15 */
16 void filtering(short** in_array, short** out_array, long height, long width)
17 {
18 short value[9];
19
20 /* linear filtering */
21 short sum;
22 for (int i = 0; i )
23 for (int j = 0; j )
24 sum += average[i][j];
25
26 for (int i = 0; i ){
27 for (int j = 0; j ){
28 value[0] = is_in_array(j-1, i-1, height, width) ? in_array[i-1][j-1] : 0;
29 value[1] = is_in_array(j, i-1, height, width) ? in_array[i-1][j] : 0;
30 value[2] = is_in_array(j+1, i-1, height, width) ? in_array[i-1][j+1] : 0;
31 value[3] = is_in_array(j-1, i, height, width) ? in_array[i][j-1] : 0;
32 value[4] = in_array[i][j];
33 value[5] = is_in_array(j+1, i, height, width) ? in_array[i][j+1] : 0;
34 value[6] = is_in_array(j-1, i+1, height, width) ? in_array[i+1][j-1] : 0;
35 value[7] = is_in_array(j, i+1, height, width) ? in_array[i+1][j] : 0;
36 value[8] = is_in_array(j+1, i+1, height, width) ? in_array[i+1][j+1] : 0;
37
38 /* linear filtering */
39 out_array[i][j] = (value[0] * average[0][0] + value[1] * average[0][1] + value[2] * average[0][2] +
40 value[3] * average[1][0] + value[4] * average[1][1] + value[5] * average[1][2] +
41 value[6] * average[2][0] + value[7] * average[2][1] + value[8] * average[2][2]) / sum;
42
43 }
44 }
45 }

统计排序(非线性)滤波器
中值滤波器
1 short mid_val(short* a, short num)
2 {
3 short temp;
4
5 for (int i = 0; i )
6 {
7 temp = a[i];
8 int j = i;
9 for (; j > 0 && a[j - 1] > temp; j--)
10 a[j] = a[j - 1];
11 a[j] = temp;
12 }
13
14 return a[num/2];
15 }
16 int is_in_array(short x, short y, short height, short width)
17 {
18 if (x >= 0 && x = 0 && y height)
19 return 1;
20 else
21 return 0;
22 }
23
24 /*
25 * element
26 * v0 v1 v2
27 * v3 v4 v5
28 * v6 v7 v8
29 *
30 */
31 void filtering(short** in_array, short** out_array, long height, long width)
32 {
33 short value[9];
34
35 for (int i = 0; i ){
36 for (int j = 0; j ){
37 value[0] = is_in_array(j-1, i-1, height, width) ? in_array[i-1][j-1] : 0;
38 value[1] = is_in_array(j, i-1, height, width) ? in_array[i-1][j] : 0;
39 value[2] = is_in_array(j+1, i-1, height, width) ? in_array[i-1][j+1] : 0;
40 value[3] = is_in_array(j-1, i, height, width) ? in_array[i][j-1] : 0;
41 value[4] = in_array[i][j];
42 value[5] = is_in_array(j+1, i, height, width) ? in_array[i][j+1] : 0;
43 value[6] = is_in_array(j-1, i+1, height, width) ? in_array[i+1][j-1] : 0;
44 value[7] = is_in_array(j, i+1, height, width) ? in_array[i+1][j] : 0;
45 value[8] = is_in_array(j+1, i+1, height, width) ? in_array[i+1][j+1] : 0;
46
47 /* median filtering */
48 out_array[i][j] = mid_val(value, 9);
49
50 }
51 }
52 }
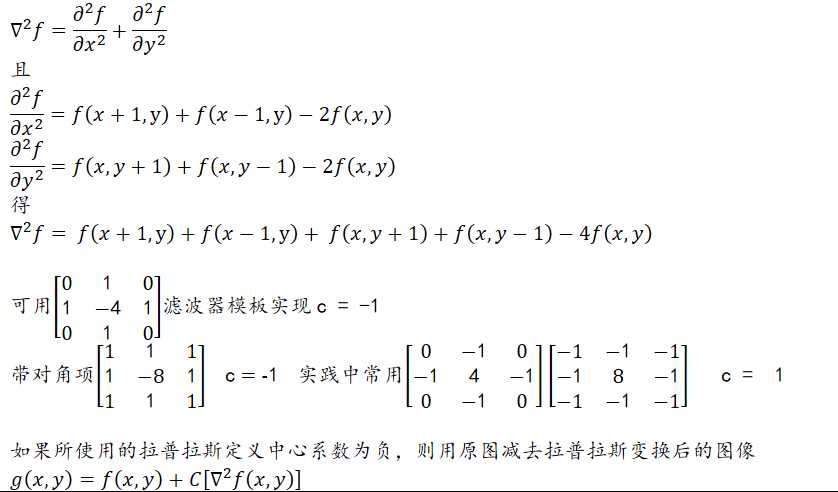
锐化空间滤波器


使用二阶微分进行图像锐化-拉普拉斯算子
1 int is_in_array(short x, short y, short height, short width)
2 {
3 if (x >= 0 && x = 0 && y height)
4 return 1;
5 else
6 return 0;
7 }
8
9 /*
10 * element
11 * v0 v1 v2
12 * v3 v4 v5
13 * v6 v7 v8
14 *
15 */
16 void filtering(short** in_array, short** out_array, long height, long width)
17 {
18 short value[9];
19
20 for (int i = 0; i ){
21 for (int j = 0; j ){
22 value[0] = is_in_array(j-1, i-1, height, width) ? in_array[i-1][j-1] : 0;
23 value[1] = is_in_array(j, i-1, height, width) ? in_array[i-1][j] : 0;
24 value[2] = is_in_array(j+1, i-1, height, width) ? in_array[i-1][j+1] : 0;
25 value[3] = is_in_array(j-1, i, height, width) ? in_array[i][j-1] : 0;
26 value[4] = in_array[i][j];
27 value[5] = is_in_array(j+1, i, height, width) ? in_array[i][j+1] : 0;
28 value[6] = is_in_array(j-1, i+1, height, width) ? in_array[i+1][j-1] : 0;
29 value[7] = is_in_array(j, i+1, height, width) ? in_array[i+1][j] : 0;
30 value[8] = is_in_array(j+1, i+1, height, width) ? in_array[i+1][j+1] : 0;
31
32 /* sharpening filtering */
33 out_array[i][j] = value[0] * sharpen[0][0] + value[1] * sharpen[0][1] + value[2] * sharpen[0][2] +
34 value[3] * sharpen[1][0] + value[4] * sharpen[1][1] + value[5] * sharpen[1][2] +
35 value[6] * sharpen[2][0] + value[7] * sharpen[2][1] + value[8] * sharpen[2][2];
36 out_array[i][j] += in_array[i][j];
37
38 }
39 }
40 }


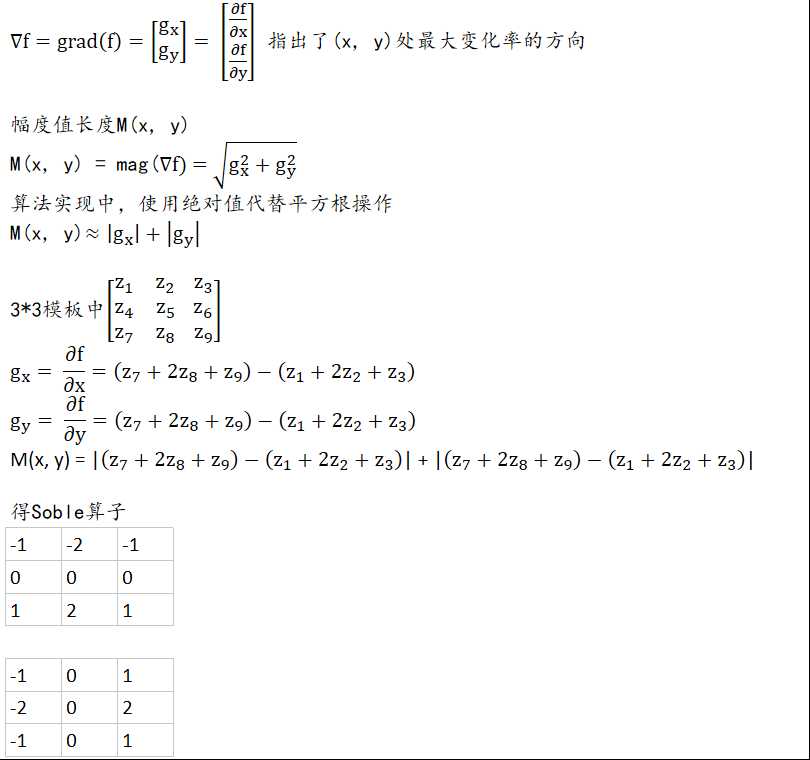
使用一阶微分对(非线性)图像锐化-梯度
1 int is_in_array(short x, short y, short height, short width)
2 {
3 if (x >= 0 && x = 0 && y height)
4 return 1;
5 else
6 return 0;
7 }
8
9 /*
10 * element
11 * v0 v1 v2
12 * v3 v4 v5
13 * v6 v7 v8
14 *
15 */
16 void filtering(short** in_array, short** out_array, long height, long width)
17 {
18 short value[9];
19
20 for (int i = 0; i ){
21 for (int j = 0; j ){
22 value[0] = is_in_array(j-1, i-1, height, width) ? in_array[i-1][j-1] : 0;
23 value[1] = is_in_array(j, i-1, height, width) ? in_array[i-1][j] : 0;
24 value[2] = is_in_array(j+1, i-1, height, width) ? in_array[i-1][j+1] : 0;
25 value[3] = is_in_array(j-1, i, height, width) ? in_array[i][j-1] : 0;
26 value[4] = in_array[i][j];
27 value[5] = is_in_array(j+1, i, height, width) ? in_array[i][j+1] : 0;
28 value[6] = is_in_array(j-1, i+1, height, width) ? in_array[i+1][j-1] : 0;
29 value[7] = is_in_array(j, i+1, height, width) ? in_array[i+1][j] : 0;
30 value[8] = is_in_array(j+1, i+1, height, width) ? in_array[i+1][j+1] : 0;
31
32 /* sharpening using grad */
33 out_array[i][j] = (short)abs(value[0] * soble1[0][0] + value[1] * soble1[0][1] + value[2] * soble1[0][2] +
34 value[3] * soble1[1][0] + value[4] * soble1[1][1] + value[5] * soble1[1][2] +
35 value[6] * soble1[2][0] + value[7] * soble1[2][1] + value[8] * soble1[2][2]) +
36 (short)abs(value[0] * soble2[0][0] + value[1] * soble2[0][1] + value[2] * soble2[0][2] +
37 value[3] * soble2[1][0] + value[4] * soble2[1][1] + value[5] * soble2[1][2] +
38 value[6] * soble2[2][0] + value[7] * soble2[2][1] + value[8] * soble2[2][2]);
39 }
40 }
41 }


上一篇:python统计词频
下一篇:多线程